Rockwell Automation Publication 2198-UM004D-EN-P - December 2022 329
Chapter 11 Motion Control in PR Mode
Jump Command The drive provides a jump command in PR Mode. It can call any PR command
or form PR commands into a loop, as shown in Figure 136
. You can specify the
PR command number to be jumped to by using PR Mode setting screen in the
configuration software. Among the options, Interrupt Previous is available,
this interrupts the currently executing motion command. DLY is the delay
time determined by shared PR parameters ID332…ID347 (P5.040…P5.055).
Once a jump command is issued, the servo drive will start counting the delay
time and execute the jump once the delay time expires.
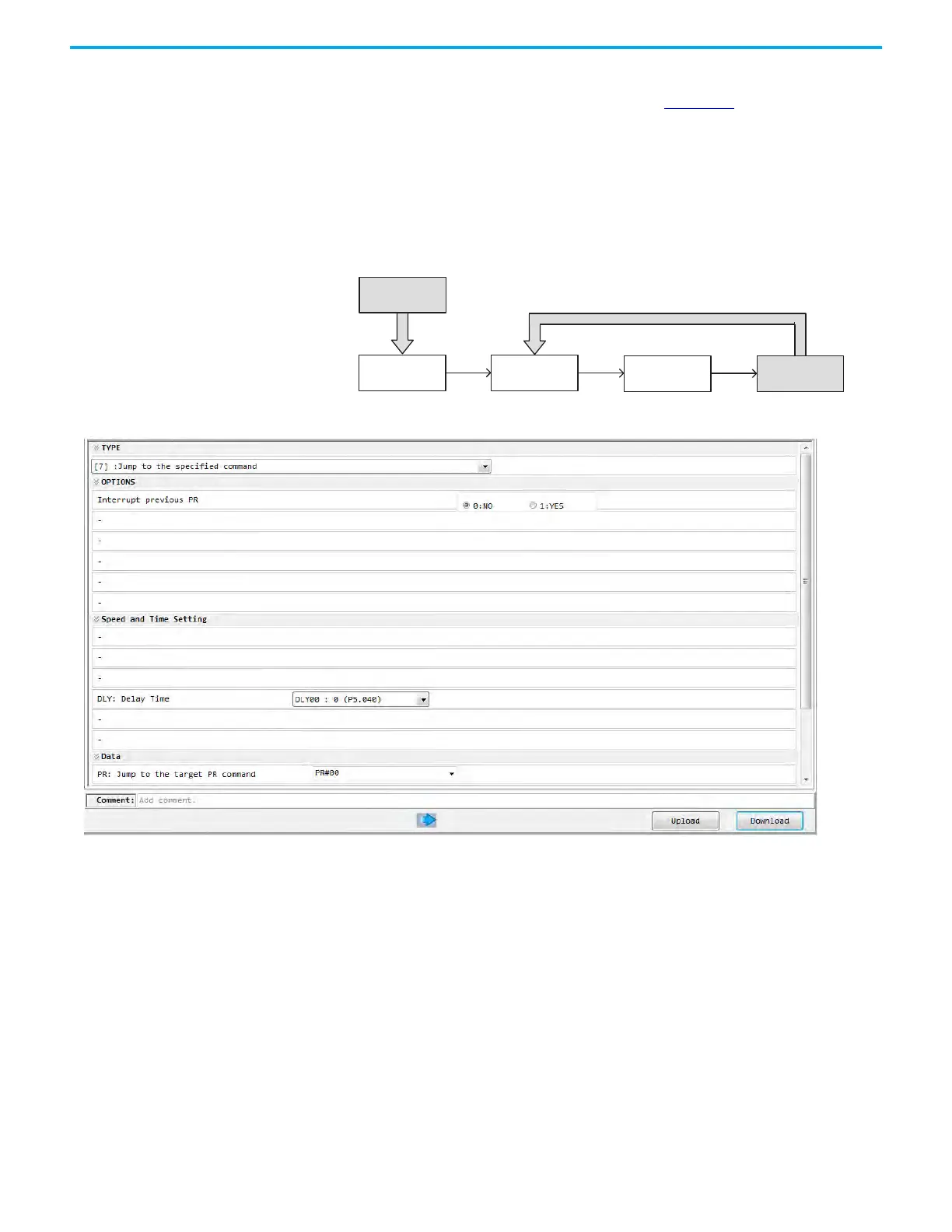
Figure 136 - Jump Command in PR Mode
Figure 137 - Using PR Mode Jump Command
PR #01
PR #07 P R #08 PR #09 PR #10
Jump
Jump

 Loading...
Loading...









