328 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 11 Motion Control in PR Mode
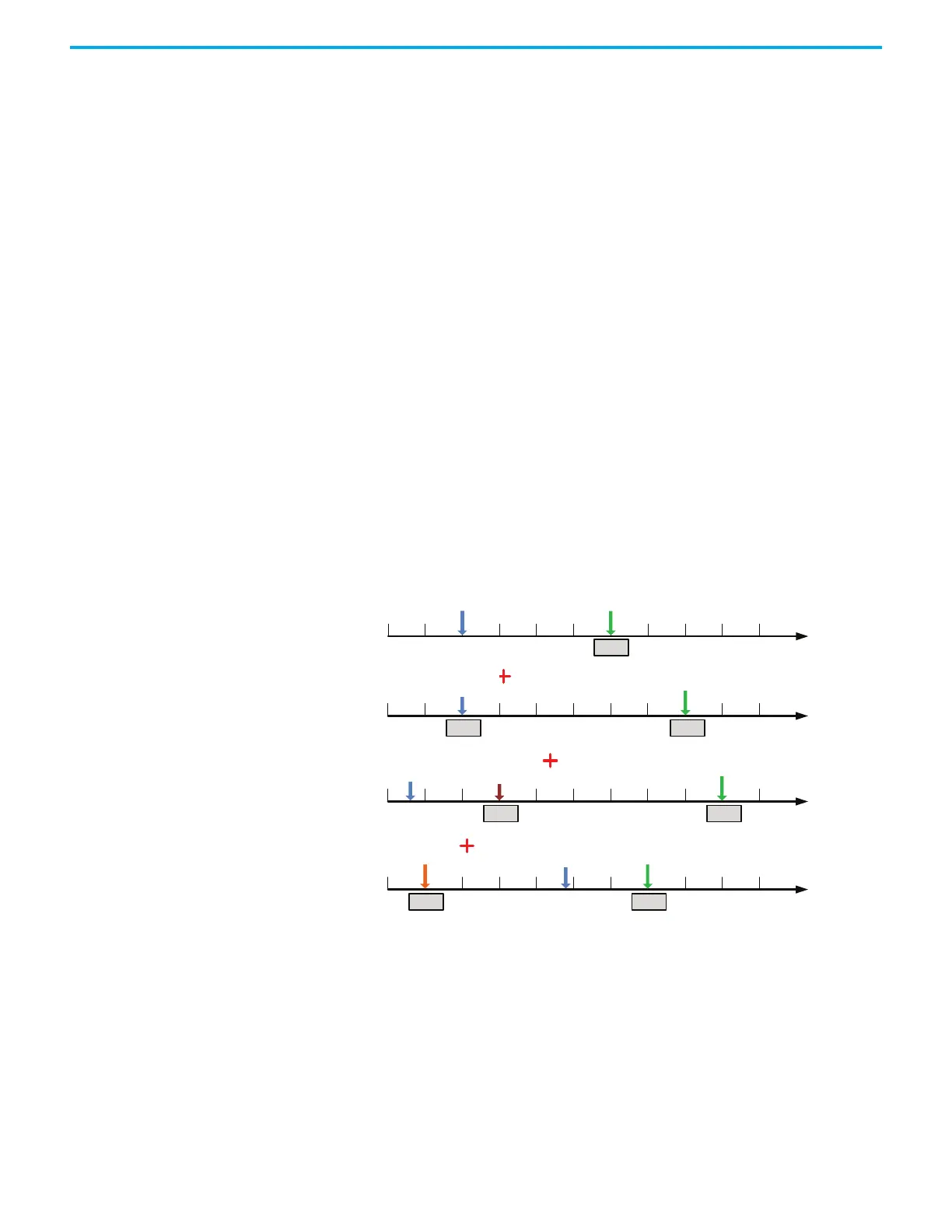
• Relative position command (REL, raC_xxx_K5100_MAM Type 7 =
Relative): when executed, the target position value is the motor's current
position value plus the position command value. In the figure, a REL
command with the value on 60000 PUU is inserted in the previous PR
command. The target position is the motor's current position (20000
PUU) plus the relative position command (60000 PUU), which equals
80000 PUU in the coordinate system. The target position specified by the
original command is omitted.
• Incremental command (INC, raC_xxx_K5100_MAM Type 1 =
Incremental): when executed, the target position is the previous target
position value plus the current position command value. In the example
below, an INC command with the value of 60000 PUU is inserted in the
previous PR command. The target position is the previous target position
value 30000 PUU plus the relative position command 60000 PUU, which
equals 90000 PUU. The previous destination specified by the previous
command is combined to define the new one.
• High-speed position capturing command
(CAP, raC_xxx_K5100_MAM Type 8 = Capture): when executed, the
target position is the last position acquired by the Capture function plus
the position command value. In the following example, a high-speed
capturing command with the value of 60000 PUU is inserted in the
previous PR command. The target position value is the captured position
value of 10000 PUU plus the relative command of 60000 PUU, which
equals 70000 PUU. The target position specified by the original
command is omitted.
Figure 135 - Four Types of Position Command
0
0 10000 20000 30000 40000 50000 60000 70000 80000 90000 100000
10000 20000 30000 40000 50000 60000 70000 80000 90000 100000
60000
Absolute command
(ABS)
60000 PUU
Motor’s current position
(Fb_PUU)
Target
position
Motor’s current
position
(Fb_PUU)
Relative command
(REL)
60000 PUU
Target
position
0
10000 20000 30000 40000 50000 60000 70000 80000 90000 100000
Motor’s current
position
(Fb_PUU)
Target
position
Endpoint of
previous command
(Cmd_E)
60000
Incremental
command (INC)
60000 PUU
0
10000 20000 30000 40000 50000 60000 70000 80000 90000 100000
Motor’s current
position
(Fb_PUU)
Target
position
Capturing
position
60000
High-speed position
capturing (CAP)
60000 PUU
Motor
current position
(Fb_PUU)
Target
position
Endpoint of
previous command
(Cmd_E)
Motor current
position
(Fb_PUU)
Motor current
position
(Fb_PUU)
Target
position
Target
position
Target
position
Motor current
position
(Fb_PUU)
Capturing
position
Incremental
command (INC)
60000 PUU
Relative command
(REL)
60000 PUU
Absolute command
(ABS)
60000 PUU
High-speed position
capturing (CAP)
60000 PUU

 Loading...
Loading...









