Rockwell Automation Publication 2198-UM004D-EN-P - December 2022 357
Chapter 11 Motion Control in PR Mode
Use PR Command Trigger ID300 (P5.007)
This method is executed when an Ethernet/IP explicit write operations are
performed with the drive, and you use PRCmdTrigger parameter ID300
(P5.007), you can specify which PR# is executed when you set the Command
Triggered DI signal.
• If you write 0 to the PRCmdTrigger register, the servo drive executes
homing.
• If you write 1…99 to PRCmdTrigger register, the servo drive executes the
specified PR command (1…99).
• If you write 1000, the servo drive stops executing PR commands and
stops motor movement, which is the same as using the DI.Stop.
• Values 100…999 are not valid.
Using ID300 (P5.007) is useful to monitor the status of the PR# operation
within the drive from an external controller.
Use IO Mode and Add-On Instruction
When the drive is configured for IO Operating mode, a pre-entered PR# can be
executed by using raC_xxx_K5100_MAI (Motion Axis Index) Add-On-
Instruction.
Because the Motion Axis Index Add-On Instruction uses a previously
configured PR, you cannot have an active Ethernet/IP network connection
when you are configuring the PR commands. The simplest way to configure
your PR commands is to use the KNX5100C software.
Once the PR Commands are configured, they cannot be changed when the I/O
connection is established. You can use this method when one of the pre-
defined Motion Operation Add-On-Instructions cannot meet your
requirements. For example, you can use this method to trigger a PR that writes
a parameter to the drive.
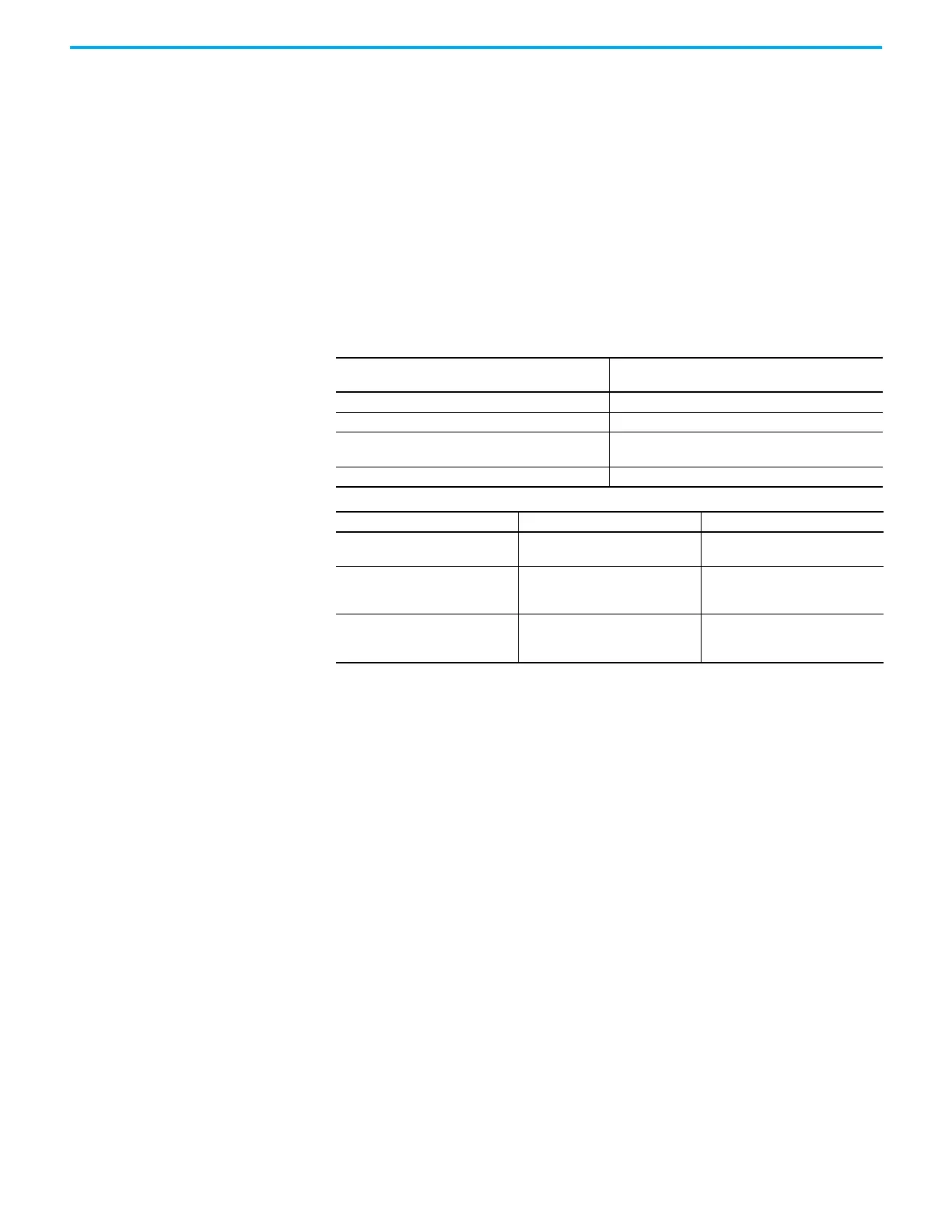
Explicit Write Data Value
PRCmdTrigger ID300 (P5.007)
Action Taken by the Drive
0 Servo executes the configured Homing Mode
1…99 Executes the specified PR configured in the drive
1000
The drive terminates the executing PR command and
stops the motor movement
100…999 Invalid
Explicit Read Execution Point Drive/Motor Execution Returned Value in ID300 (P5.007)
During the beginning of the
command - before motion starts
Drive is processing the command,
motor has not started movement
PR# that is specified in the drive.
While the command is complete and
the motor is moving but not reached
its target position
Motor is moving, but has not reached
the target position
PR# that is specified + 10,000
While the command is complete and
the motor has reached its target
position
Motor is finished moving and
reached the target position
PR# that is specified + 20,000

 Loading...
Loading...









