412 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 13 Kinetix 5100 Safe Torque Off (STO) Feature
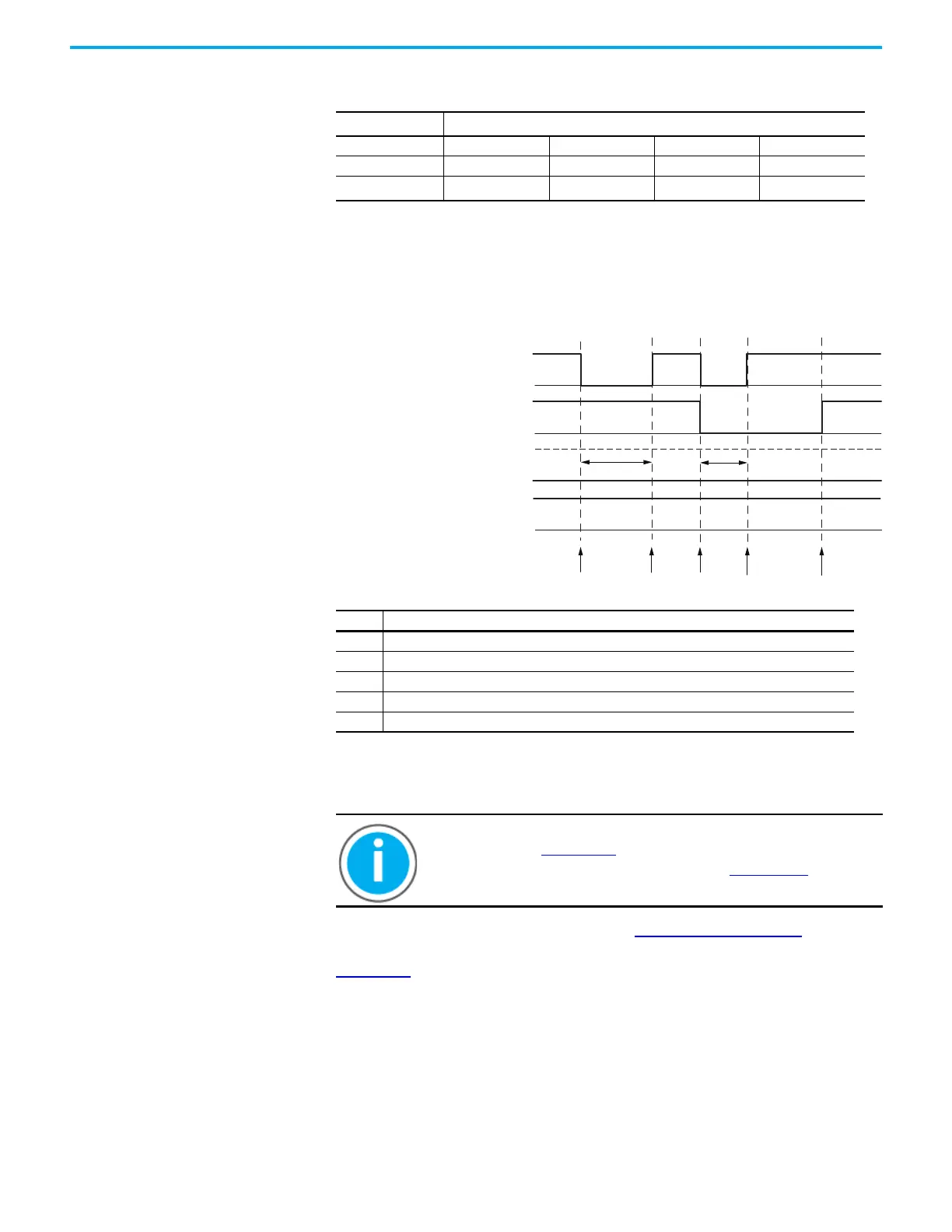
Figure 219 - System Operation when Inputs are Meeting Timing Requirements
STO-related Fault Codes
For information on how to clear faults, see Clear Faults on page 454.
Figure 220
demonstrates when the safe torque-off mismatch is detected and
fault E 501 (STO_A signal loss) or E 502 (STO_B signal loss) is posted.
Table 125 - ID107 (P0.046) ServoOutputStatus
Channel
Status of Output
(1)
(1) ServoOutputStatus is located in KNX5100C software>Parameter Editor>Status Monitor.
STO_AONONOFFOFF
STO_B ON OFF ON OFF
Status
Ready
(2)
(2) Kinetix 5100 drive is Ready and able to produce torque (current) to the motor. ServoOutputStatus/Servo Ready (Bit 0) = 1.
Torque off
(3)
(3) When STO_B is lost for more than 1 second, with STO_A high, the Kinetix 5100 drive faults (E 502) and has no motor torque
(current). ServoOutputStatus/Servo Ready (Bit 0) = 0.
Torque off
(4)
(4) When STO_A is lost for more than 1 second, with STO_B high, the Kinetix 5100 drive faults (E 501) and has no motor torque
(current). ServoOutputStatus/Servo Ready (Bit 0) = 0.
Torque off
(5)
(5) When both STO_A and STO_B are lost for more than 10 ms, the Kinetix 5100 drive faults (E 500) and has no motor torque
(current). ServoOutputStatus/Servo Ready (Bit 0) = 0.
24V DC
24V DC
0V DC
0V DC
1
0
< 10 ms
1
234
5
< 1 Second
1
0
STO Fault Code
STO_A (S1)
STO_B (S2)
ServoOutputStatus/Servo Ready, Bit 0
Event Description
1 One input is switched-off and second input is on.
2 First input is switched-on within 1 second.
3 Both inputs are switched-off.
4 Both inputs are in OFF state simultaneously within 10 ms.
5 Second input is switched-on within 1 second of event 4.
This manual links to Kinetix® 5100 Servo Drive Fault Codes Reference
Data, publication 2198-RD001
, for fault codes and Kinetix 5100 Servo
Drive Parameters Reference Data, publication 2198-RD002
, for
parameters. Download the spreadsheets now for offline access.

 Loading...
Loading...









