Rockwell Automation Publication 2198-UM004D-EN-P - December 2022 413
Chapter 13 Kinetix 5100 Safe Torque Off (STO) Feature
Figure 220 - System Operation in the Event that the Safety Enable Inputs Mismatch
When the STO self-diagnostic (STO circuit and wiring, for example) fails, fault
E 503 is posted.
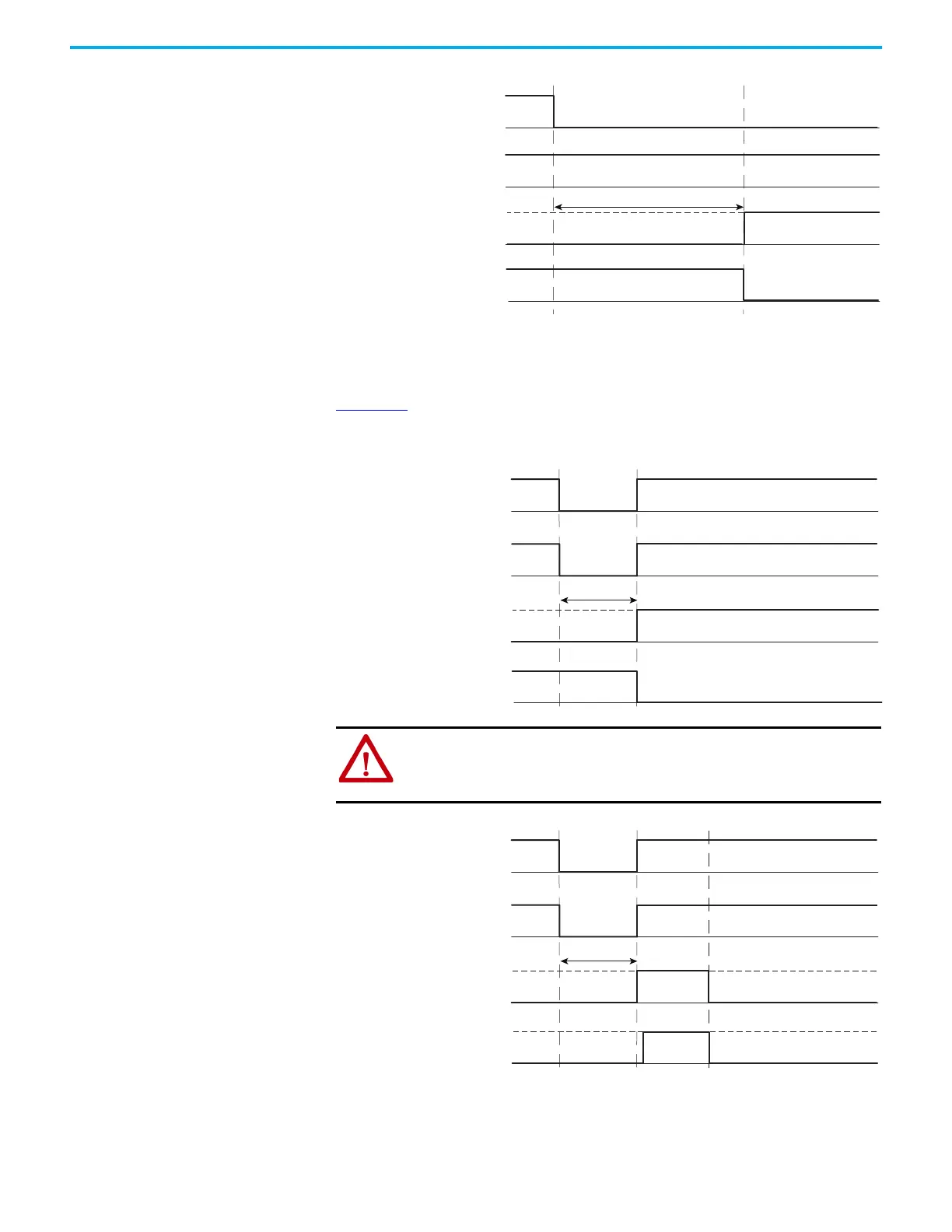
Figure 221
demonstrates when both inputs in the OFF state are detected and
fault E 500 (STO enabled) is posted.
Figure 221 - System Operation When Both Safety Enable Inputs are in OFF State Simultaneously
Figure 222 - Typical Fault Reset Sequence
24V DC
24V DC
0V DC
0V DC
1
0
1 Second
1
0
STO Fault Code E 501
STO_A (S1)
STO_B (S2)
ServoOutputStatus/Servo Ready, Bit 0
24V DC
24V DC
0V DC
0V DC
1
0
10 ms
1
0
STO Fault Code E 500
STO_A (S1)
STO_B (S2)
ServoOutputStatus/Servo Ready, Bit 0
ATTENTION: The safe torque-off fault is detected upon demand of the Safe
Torque Off (STO) function. After troubleshooting the STO function or
performing maintenance that might affect the STO function, the STO
function must be executed to verify correct operation.
24V DC
24V DC
0V DC
0V DC
1
0
10 ms
1
0
STO Fault Code E 500
STO_A (S1)
STO_B (S2)
Fault Reset Command

 Loading...
Loading...









