Rockwell Automation Publication 2198-UM004D-EN-P - December 2022 57
Chapter 3 Connector Data and Feature Descriptions
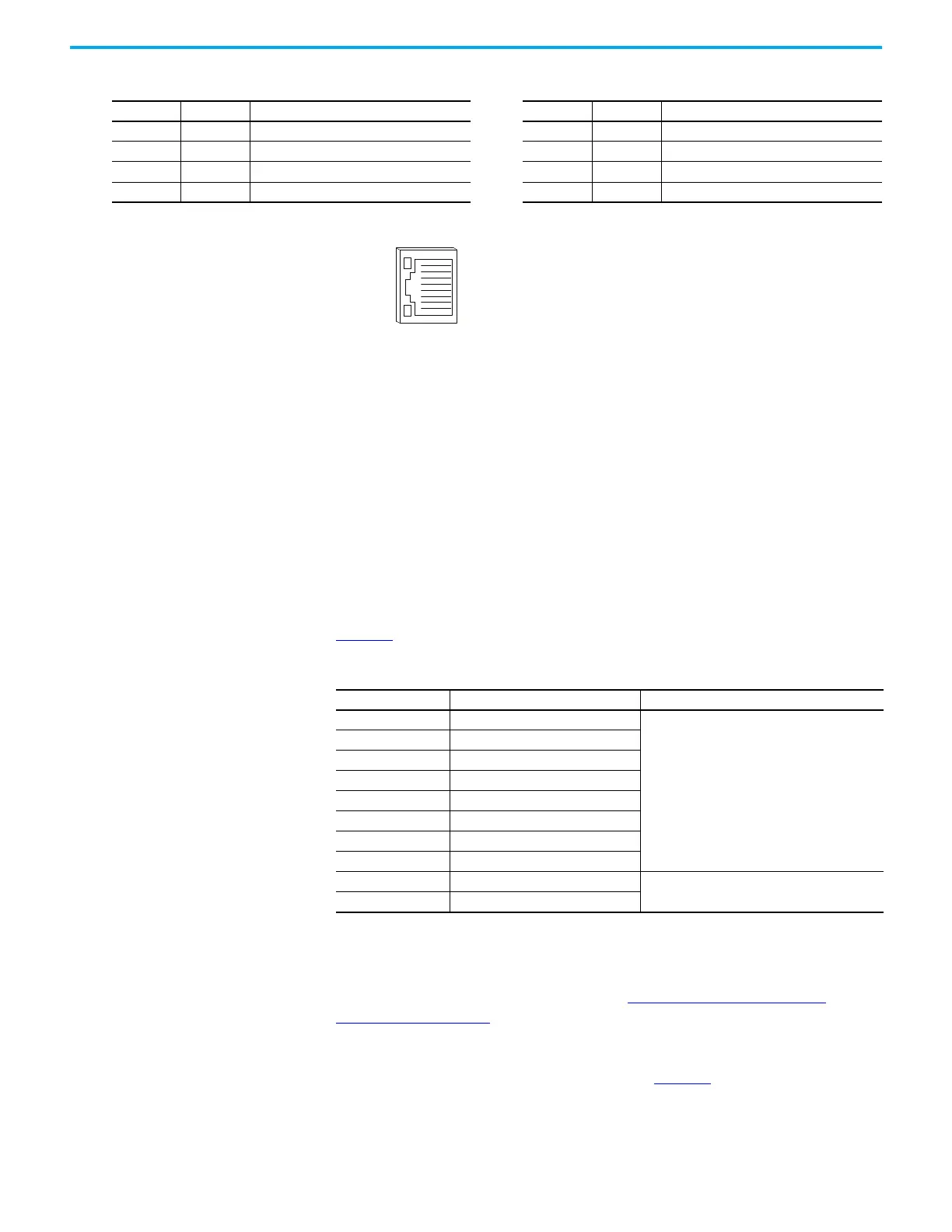
Ethernet Communication Connector Pinout
Figure 26 - Pin Orientation for 8-pin Ethernet Communication Port
Control Signal
Specifications
This section provides a description of the Kinetix 5100 drive digital I/O, analog
outputs, Ethernet communication, motor brake circuitry, and control power
current specifications.
Digital Inputs
The Kinetix 5100 drive supports ten customer-defined digital input (DI) points
to provide maximum flexibility. All inputs are configurable with KNX5100C
software.
Registration inputs can only be assigned to high-speed inputs as shown in
Table 23
.
The default input configuration is disabled for all modes. Assignments can be
changed via KNX5100C software > Digital IO/Jog Control in the Function List.
The digital input functions are defined in Description of Digital Input
Functions on page 433. If the defined digital input function needs to change to
meet your application requirements, you can change the functions by using a
PR Write to Parameters program type for the function of INPUT1…INPUT10 by
using the corresponding parameters listed in Table 24
.
Port 1 Pin Signal Description Port 1 Pin Signal Description
1 + TX Transmit Port (+) Data Terminal 5 – –
2 – TX Transmit Port (–) Data Terminal 6 – RX Receive Port (–) Data Terminal
3 + RX Receive Port (+) Data Terminal 7 – –
4–– 8––
Table 23 - Digital Input Assignments
Digital Input Function Function
INPUT1 Digital input 1
User configurable, excluding registration
INPUT2 Digital input 2
INPUT3 Digital input 3
INPUT4 Digital input 4
INPUT5 Digital input 5
INPUT6 Digital input 6
INPUT7 Digital input 7
INPUT8 Digital input 8
INPUT9 Digital input 9 (high speed)
User configurable, including registration
INPUT10 Digital input 10 (high speed)

 Loading...
Loading...









