Rockwell Automation Publication 2198-UM004D-EN-P - December 2022 279
Chapter 10 Modes of Operation
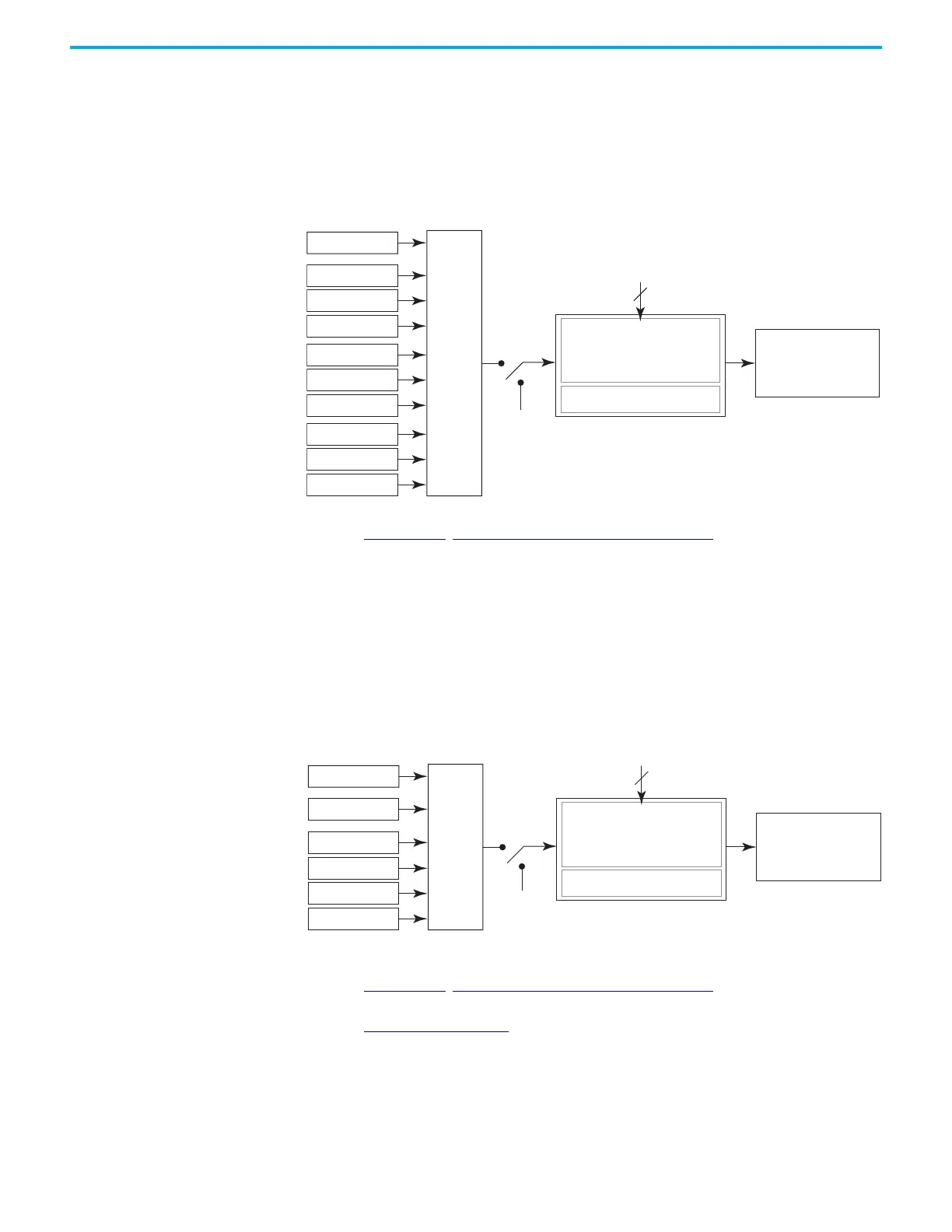
IO Mode - Position
When the IO Mode is used and the drive internal sub-mode is Position Mode
(1), the drive command is an index or constant speed operation. Typically, the
Motion Add-On Instruction are used to perform the index
(raC_xxx_K5100_MAM) or Jog (raC_xxx_K5100_MAJ) operation. The control
structure of position mode is as follows.
See Appendix C
, Use Add-On Instructions on page 489, for more information.
IO Mode - Home
When the IO Mode is used and the drive internal sub-mode is Home Mode (3),
the drive command is a homing operation. Typically, the Motion Add-On
Instruction are used to perform the home operation (raC_xxx_K5100_MAH).
The control structure of home mode is as follows.
See Appendix C
, Use Add-On Instructions on page 489, for more information.
See Homing
on page 298 for more information.
GNUM0, GNUM1
GearRatioFollowerCounts N1 - ID151 (P1.044)
GearRatioFollowerCounts N2 - ID236 (P2.060)
GearRatioFollowerCounts N3 - ID237 (P2.061)
GearRatioFollowerCounts N4 - ID238 (P2.062)
GearRatioMasterCounts - ID152 (P1.045)
O.PositionReference
Position
Command
Generator
1. ID117 (P1.001)
2. O. Operation
Mode Setting
Other
Position
Commands
Numerators
Denominator
Filters
ID124 (P1.008)
ID134…ID138 (P1.024…P1.028)
ID143 (P1.036)
ID170 (P1.068)
O.SpeedReference
O.Acceleration
O.Deceleration
O.Selection
O.CyclicMoveType
O.MoveMethod
O.CaptureSource
O.Overlap
O.Interrupt
NOTE: ‘O.xxx’ are the output parameters of the I/O assembly.
Graphic to be recreated in
Adobe Illustrator and to
include ID #s.
GNUM0, GNUM1
GearRatioFollowerCounts N1 - ID151 (P1.044)
GearRatioFollowerCounts N2 - ID236 (P2.060)
GearRatioFollowerCounts N3 - ID237 (P2.061)
GearRatioFollowerCounts N4 - ID238 (P2.062)
GearRatioMasterCounts - ID152 (P1.045)
O.HomingMethod
Position
Command
Generator
1. ID117 (P1.001)
2. O. Operation
Mode Setting
Other
Position
Commands
Numerators
Denominator
Filters
ID124 (P1.008)
ID134…ID138 (P1.024…P1.028)
ID143 (P1.036)
ID170 (P1.068)
O.PositionReference
O.SpeedReference
O.HomeReturnSpeed
O.Acceleration
O.Deceleration
NOTE: ‘O.xxx’ are the output parameters of the I/O assembly.

 Loading...
Loading...









