278 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 10 Modes of Operation
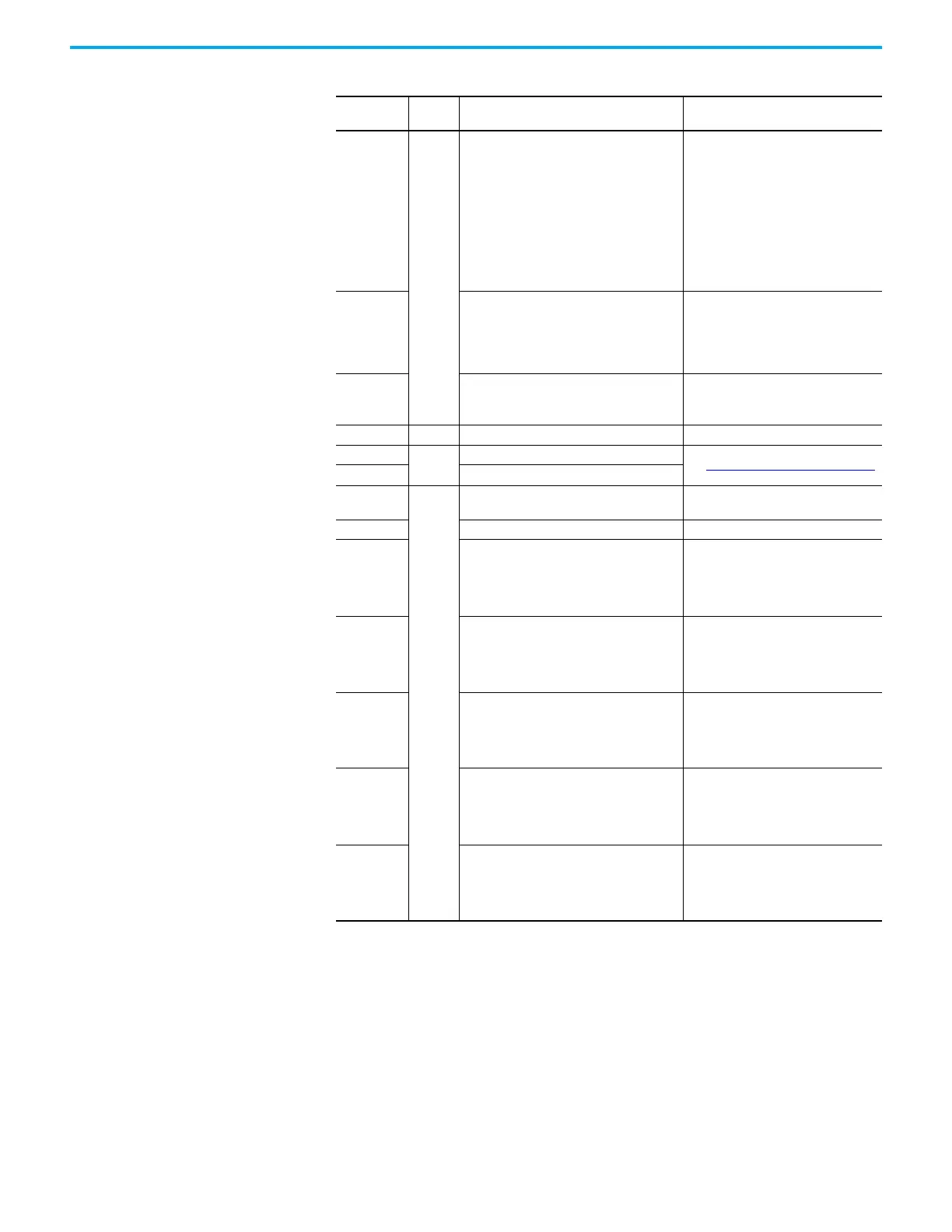
Operating
mode (input)
SINT
Indicates the driv
e Operation Mode
Its value may be:
• -128…+1: Reserved
• 0: Mode not specified
•1: Position mode
• 2: Speed mode
• 3: Home mode
•4: Torque mode
•5: Gear mode
• 6: Index mode
•7…127: Reserved
Active index Indicates the currently executing index (PR)
Currently executing index:
• -128…+1: Reserved
• 0: PR 0: Homing
• 1…99: PR 1…PR 99
•100…127: Reserved
Motor type
Indicates which type of motor is connected to
the drive
• 0: No motor connected
• 1: Rotary motor connected
• 2: Linear motor connected
Actual speed DINT Motor actual velocity The value is RPM
Fault code
UINT
Fault code
See View Status and Faults
on page 450
Warning code Warning code
Actual
position
DINT
Motor Actual Position PUU (counts or user units)
Actual torque Actual Motor Torque % motor rated torque
Parameter
monitor 1
value
Parameter monitor selection 1
0 - no parameter is selected
0x0001…0xFFFF - returned value
mapped from KNX5100C Function
List>Parameter Editor>StatusMonitor
ID060
Parameter
monitor 2
value
Parameter monitor selection 2
0 - no parameter is selected
0x0001…0xFFFF - returned value
mapped from KNX5100C Function
List>Parameter Editor>StatusMonitor
ID061
Parameter
monitor 3
value
Parameter monitor selection 3
0 - no parameter is selected
0x0001…0xFFFF - returned value
mapped from KNX5100C Function
List>Parameter Editor>StatusMonitor
ID062
Parameter
monitor 4
value
Parameter monitor selection 4
0 - no parameter is selected
0x0001…0xFFFF - returned value
mapped from KNX5100C Function
List>Parameter Editor>StatusMonitor
ID063
Parameter
monitor 5
value
Parameter monitor selection 5
0 - no parameter is selected
0x0001…0xFFFF - returned value
mapped from KNX5100C Function
List>Parameter Editor>StatusMonitor
ID064
Table 106 - Kinetix 5100 Drive Input Assembly Data Description (Continued)
Name
Data
Type
Description Semantics of Values

 Loading...
Loading...









