Rockwell Automation Publication 2198-UM004D-EN-P - December 2022 353
Chapter 11 Motion Control in PR Mode
Index Position Command PR Display
You can use the Indexing Position command in any PR command
(PR#1…PR#99). The number of PR commands is determined by the index
number. It is identified or indicated as "Index Position". See Figure 162
.
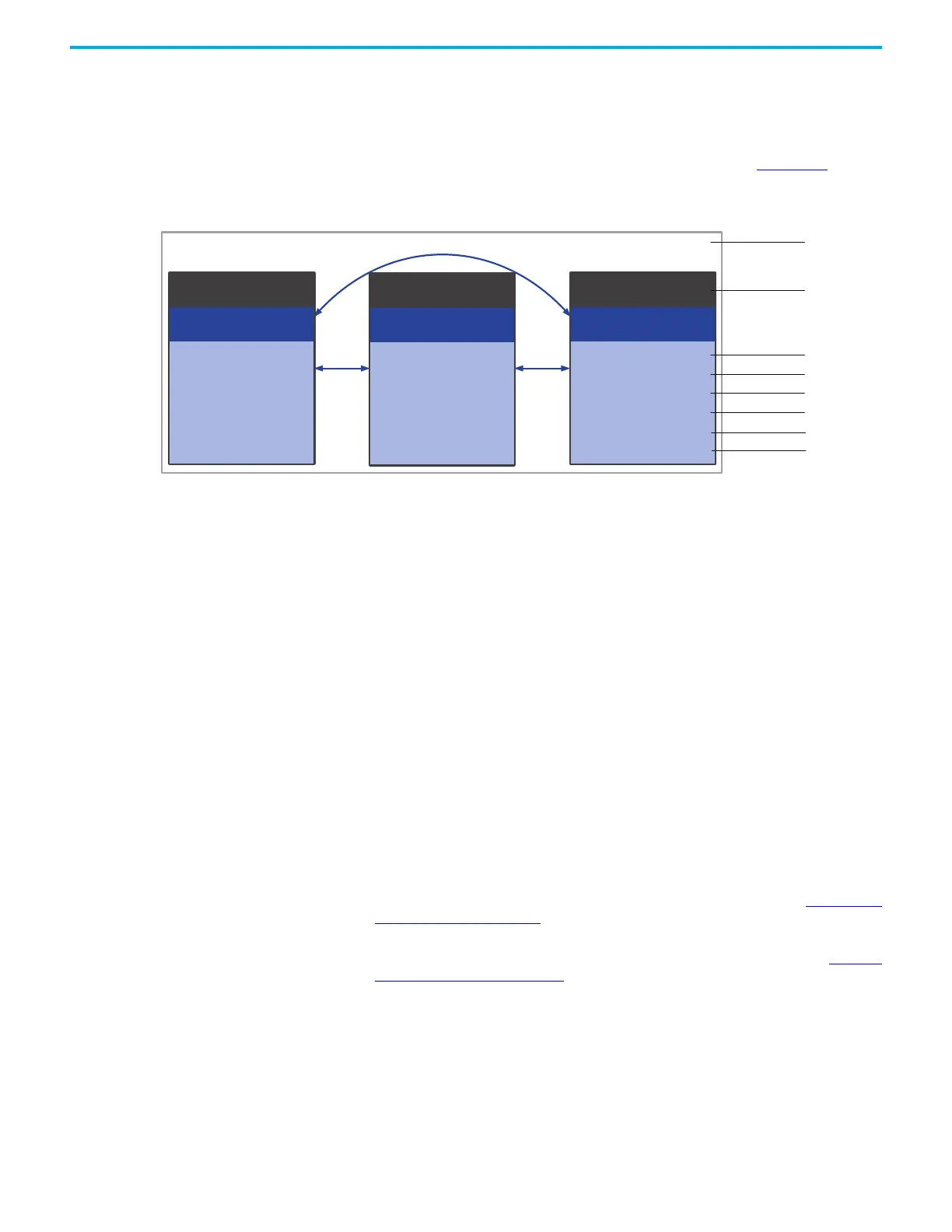
Figure 162 - Indexing Position Command Display
1. Indexing Position command section: the number of the index position. It
shows the total moving distance at the top using double arrows to show
that the motor can run reciprocally between each target position in each
PR command.
2. Command execution type: a position command can interrupt (INS) the
previous PR command. If the Interrupt function is enabled, it displays
(I). If not, no information is displayed. The Position command can
overlap (OVLP) the next PR command. If delay time is set to 0 when this
function is enabled, it displays (O). If the Overlap function is not used, no
information is displayed.
3. Delay time (DLY): determined by shared PR parameters. It is defined by a
command from the controller. The servo drive starts counting the delay
time once it reaches the target position.
4. Position command: the numerator is the position of this PR command;
the denominator is the total moving distance of this indexing Position
command, which is set by ID234 (P2.052) IndexingCoordinatesScale.
5. Rotation direction (Dir): available options are Forward (always move
forward), Reverse (always move in reverse direction), and the shortest
distance.
6. Target speed: determined by shared PR parameters.
7. Acceleration time (ACC): determined by shared PR parameters; the
length of time to reach the 3000 rpm speed from stopped. See Shared PR
Parameters on page 293.
8. Deceleration time (DEC): determined by shared PR parameters; the
length of time to decelerate from 3000 rpm speed to stopped. See Shared
PR Parameters on page 293.
PR#2 (I)(O)
Index Position
DLY=[0] 0 ms
33333/100000 PUU
Dir=[0] Forward
Speed=200 rpm
Acc=[0] 6.67 ms
Dec=[0] 6.67 ms
Index Position List [100000]
PR#1 (I)(O)
Index Position
DLY=[0] 0 ms
0/100000 PUU
Dir=[0] Forward
Speed=200 rpm
Acc=[0] 6.67 ms
Dec=[0] 6.67 ms
PR#3 (I)(O)
Index Position
DLY=[0] 0 ms
66667/100000 PUU
Dir=[0] Forward
Speed=200 rpm
Acc=[0] 6.67 ms
Dec=[0] 6.67 ms
1
2
3
4
5
6
7
8

 Loading...
Loading...









