Rockwell Automation Publication 2198-UM004D-EN-P - December 2022 267
Chapter 10 Modes of Operation
Apply the Torque Limit
The issuing method of torque limit command and torque command are
identical. The command source can be external analog voltage, which used
with Max Torque Command ID148 (P1.041) or internal parameters
ID128…ID130 (P1.012…P1.014).
Torque limit can be used in position mode (PT, PR) or speed mode (S). It is
used for limiting the motor torque output. When the command in position
mode is issued by external pulse or the command in speed mode is issued by
external analog voltage, DI signals are available and can be set to TCM0…TCM1
to determine the torque limit command (internal parameters). If there are not
enough DI signals available, you can limit the torque by using the analog
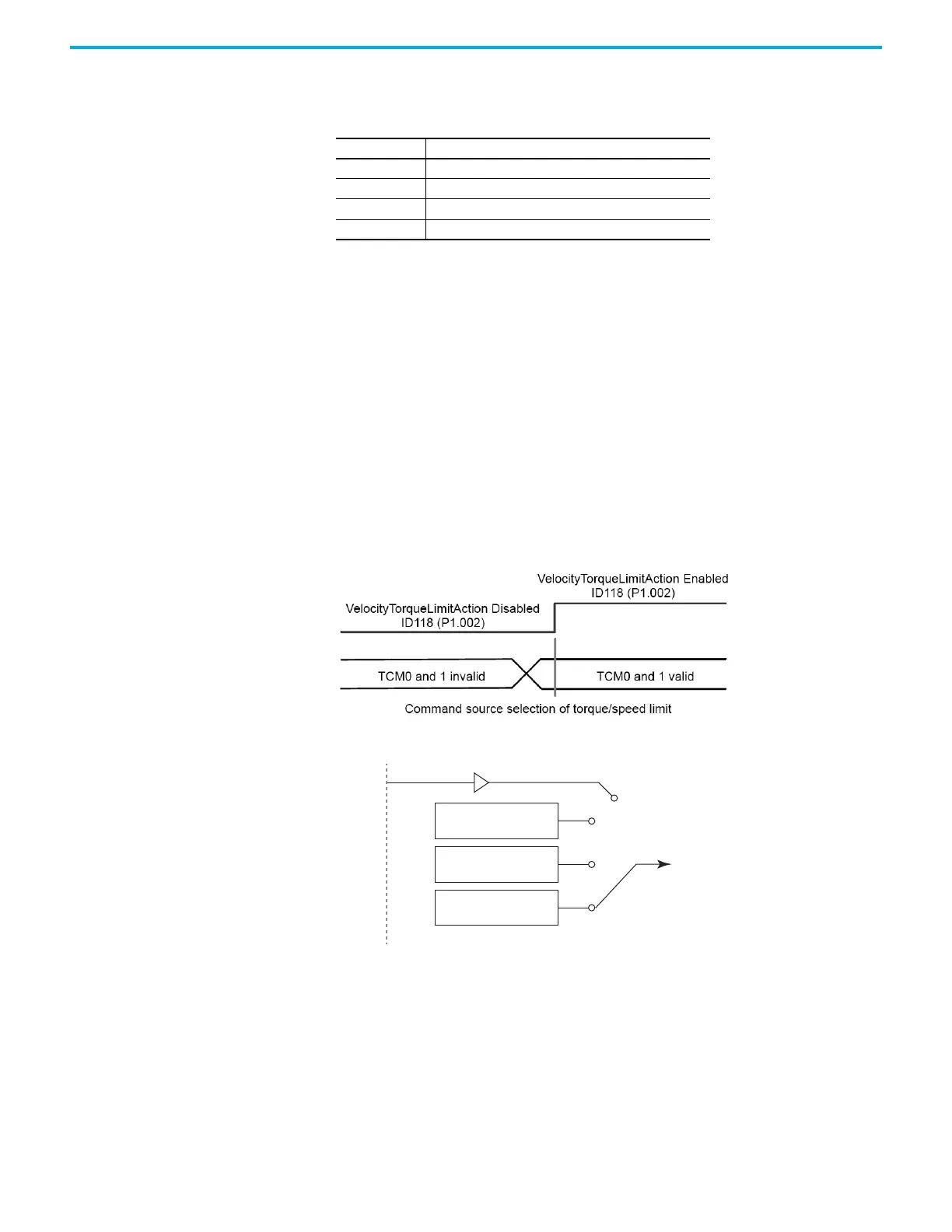
voltage command with Max Torque Command ID148 (P1.041). When the
parameter ID118 (P1.002) is set to 1, the different torque limiting presets are
used. When ID118 (P1.002) is set to 0, then Max Torque Command ID148
(P1.041) value is used to limit torque. See the following timing diagram.
To set the torque limit, see the following diagram.
Table 100 - Relevant Parameters
Parameter Name
ID118 (P1.002) VelocityTorqueLimitAction
ID128 (P1.012) PresetTorqueCmd_Limit_1
ID128 (P1.013) PresetTorqueCmd_Limit_2
ID130 (P1.014) PresetTorqueCmd_Limit_3
Select by I/O Connector DI.TCM0, DI.TCM1 signal
Vref
command)
(0)
PresetTorqueCmd_Limit_1
ID128 (P1.012)
PresetTorqueCmd_Limit_2
ID129 (P1.013)
Torque Limit
Command
PresetTorqueCmd_Limit_3
ID130 (P1.014)

 Loading...
Loading...









