164 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 7 Configure the Drive with KNX5100C Software
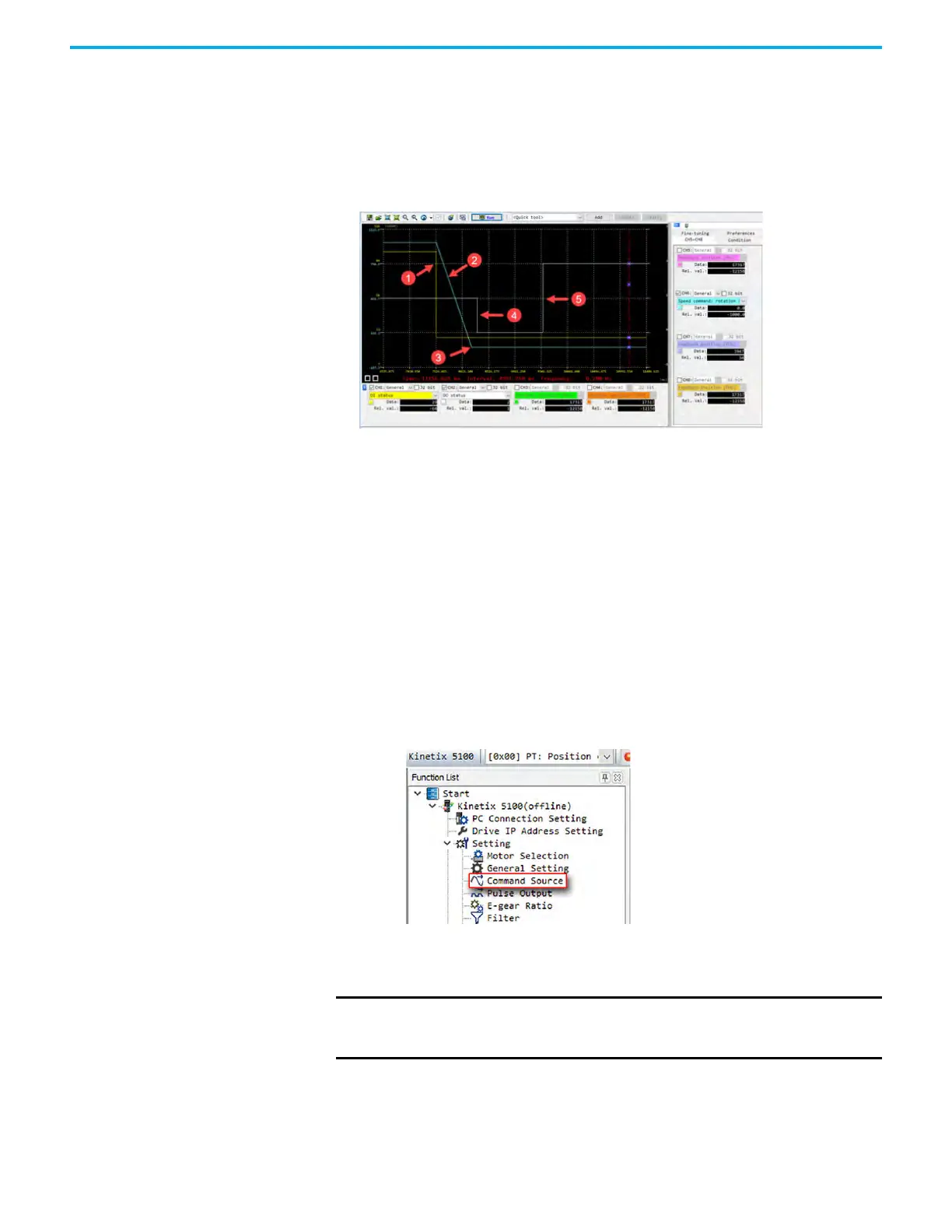
The scope trace below shows the holding brake timing:
1. DI is on and transitions off.
2. Motor is decelerated (blue pen is motor speed).
3. Motor reaches zero speed
4. DO Brake Control is off and Brake EngageTime begins timing
5. Once the BrakeEngageTime expires, the motor is disabled
Configure the Command Source
The selected operation mode allows the modification of different parameters.
The configuration of the Command Source is available with: I/O Terminal
Block input, Speed Mode, and Torque Mode. Command Source is not available
for Position Register (PR) or IO Modes.
Configure the Command Source for Position mode (I/O Terminal block input -PT Mode)
To configure the Command Source for Position mode, perform the following
steps.
1. From the Function List, choose Start>Kinetix 5100>Setting and select the
Operating Mode as PT:Position Mode (I/O terminal block input).
In Command Source, the Position Mode (I/O terminal block input) tab is
used.
IMPORTANT
If you have configured a dual or multiple operation mode, more than
one tab is visible. For example, if you have PT/S mode, you get a
Position mode (I/O terminal block input) tab and a Speed mode tab.

 Loading...
Loading...









