Rockwell Automation Publication 2198-UM004D-EN-P - December 2022 397
Chapter 12 Motion Control Applications
E-CAM Alignment
E-CAM phase alignment is a cam compensation method provided by the servo
drive. You must first set the phase of the cam alignment and the position of the
external sensor. Each time the cam runs to the position of the external sensor,
the drive compares the difference between the actual phase and the correct
phase. The difference is stored in the PR program. You can choose to
compensate immediately or later.
E-CAM Alignment Operation Setting
The settings for ID245 (P2.073)ECamConfiguration are described below.
• YX - range of filter (0…95%)
When the DI.ALGN Electronic cam phase alignment [0x35] signal is
triggered, the E-CAM alignment function is enabled. The system detects
the current E-CAM position. When the difference between the current E-
CAM position and its previous alignment position is less than the
parameter's range as a percentage, the filter function is enabled.
Otherwise, the system uses the new position to do the alignment.
• UZ - maximum allowable correction rate (0…100%)
When alignment correction is enabled, the limitation of the maximum
allowable correction rate (C) is defined as follows:
|C|<= [(ID372) (P5.084) / ID371 (P5.083)] x ID245 (P2.073.UZ) %
When the alignment error is too large, correcting this error once may
cause motor vibration or overloading. Using this parameter can divide
the alignment correction into several stages to smooth the process, but it
may need more time to complete the alignment correction.
Table 123 - E-CAM Alignment Settings
Parameter Name
ID245 (P2.073) ECamConfiguration
ID246 (P2.074) ECamDIDelayTimeCompensation
ID247 (P2.075) ECamAlignementTargetPosition
BA PR number YX Range of filter (0…95%)
DC Masking range (0 … 95%) UZ
Maximum allowable correction rate
(0…100%)
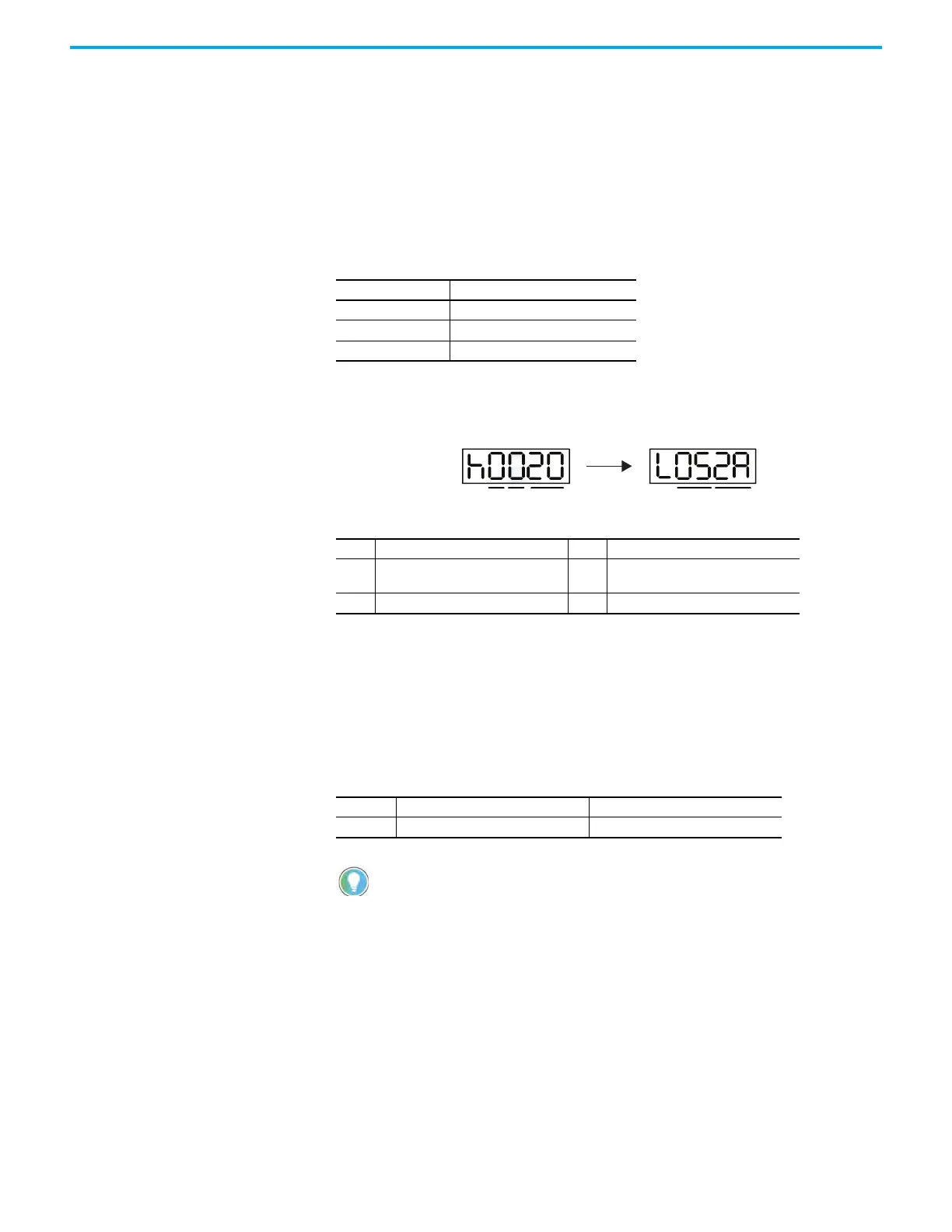
hHigh bit LLow bit
YX 00 01…5F
Function Filter disabled | Error | <= (1 to YX)%: filter enabled
Using the filter allows the alignment to be more stable and reduces any position
errors caused by DI noise and results in smoother operation.
CD
BA

 Loading...
Loading...









