Rockwell Automation Publication 2198-UM004D-EN-P - December 2022 375
Chapter 12 Motion Control Applications
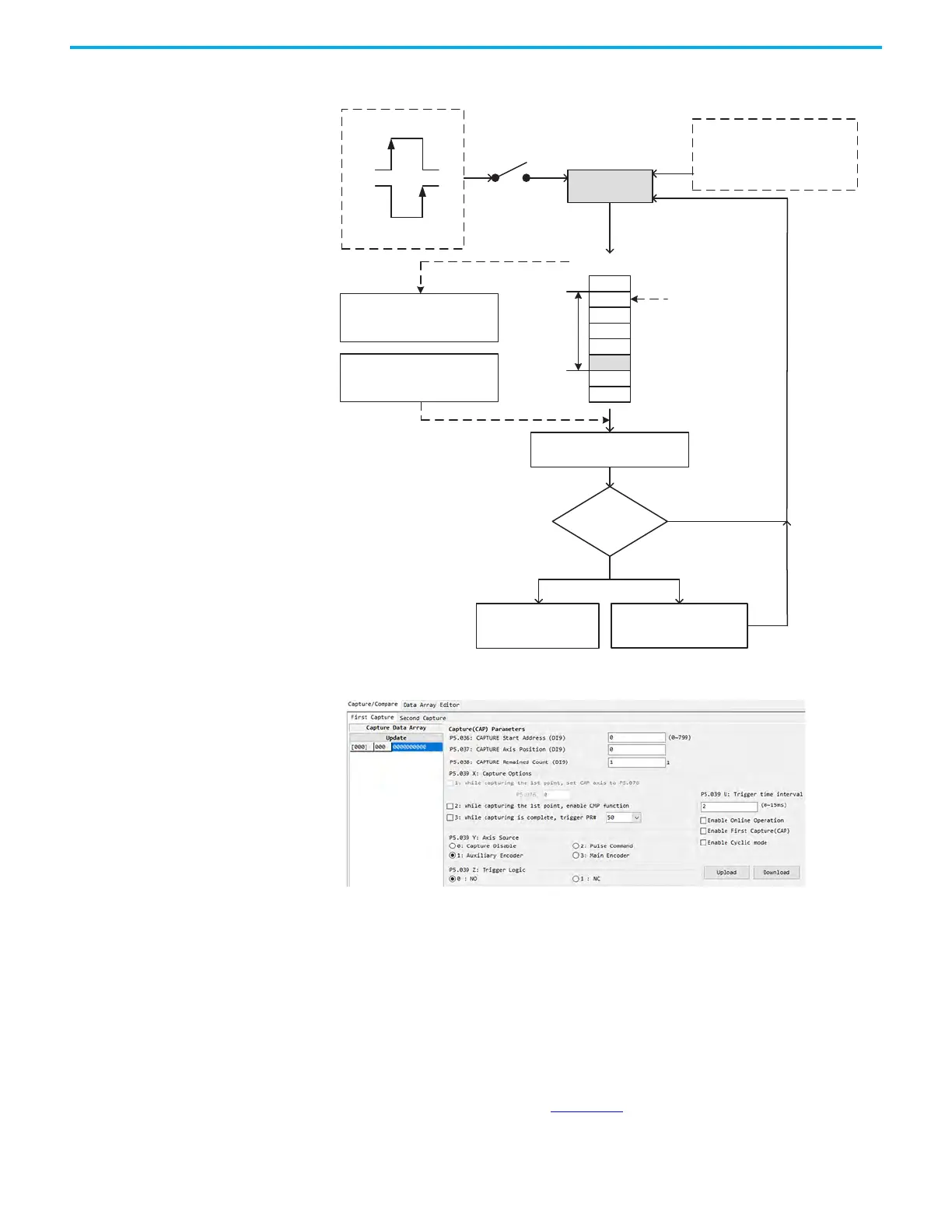
Figure 182 - High-speed Position Capture Flowchart (DI9 example)
Figure 183 - Capture Function Screen
Using PR Command Programming with the Capture Function
You can use KNX5100C software to configure the Capture function. However,
if the functions must change while the application is running, you can use
PR Write command to change it.
With PR write command programming, write commands configure the high-
speed position capture function, as well as execute the motion commands once
configuration is complete. See Chapter 11
for details on PR command
programming.
CAP Axis Source
Normally Open
ID331 (P5.039.Z) = 0
DI9
Normally Closed
ID331 (P5.039.Z) = 1
DI9
CAP Switch
ID331 (P5.039.X) Bit 0
CAP Axis
Position
ID329 (P5.037)
7890
CAP Axis Source
Aux Encoder ID331 (P5.039.Y) = 1
Pulse Command ID331 (P5.039.Y) = 2
Main Encoder ID331 (P5.039.Y) = 3
Data Array
Reset the First Position
ID331 (P5.039.X) Bit 1 = 1
First Position = ID368 (P5.076)
Enable CMP after the
first data is captured.
ID331 (P5.039.X) Bit 2 = 1
CAP Amount
ID330 (P5.038)
Start Address
ID328 (P5.036)
CAP Amount
ID330 (P5.038) = ID330 (P5.038) - 1
CAP Completed?
ID330 (P5.038) = 0
No
Yes
Call PR#50
ID331 (P5.039.X) Bit 3 = 1
Cyclic CAP ID131 (P1.019.X) = 1
ID330 (P5.038) = Previous
Setting Value
1234
2345
5678
6789
7890

 Loading...
Loading...









