374 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 12 Motion Control Applications
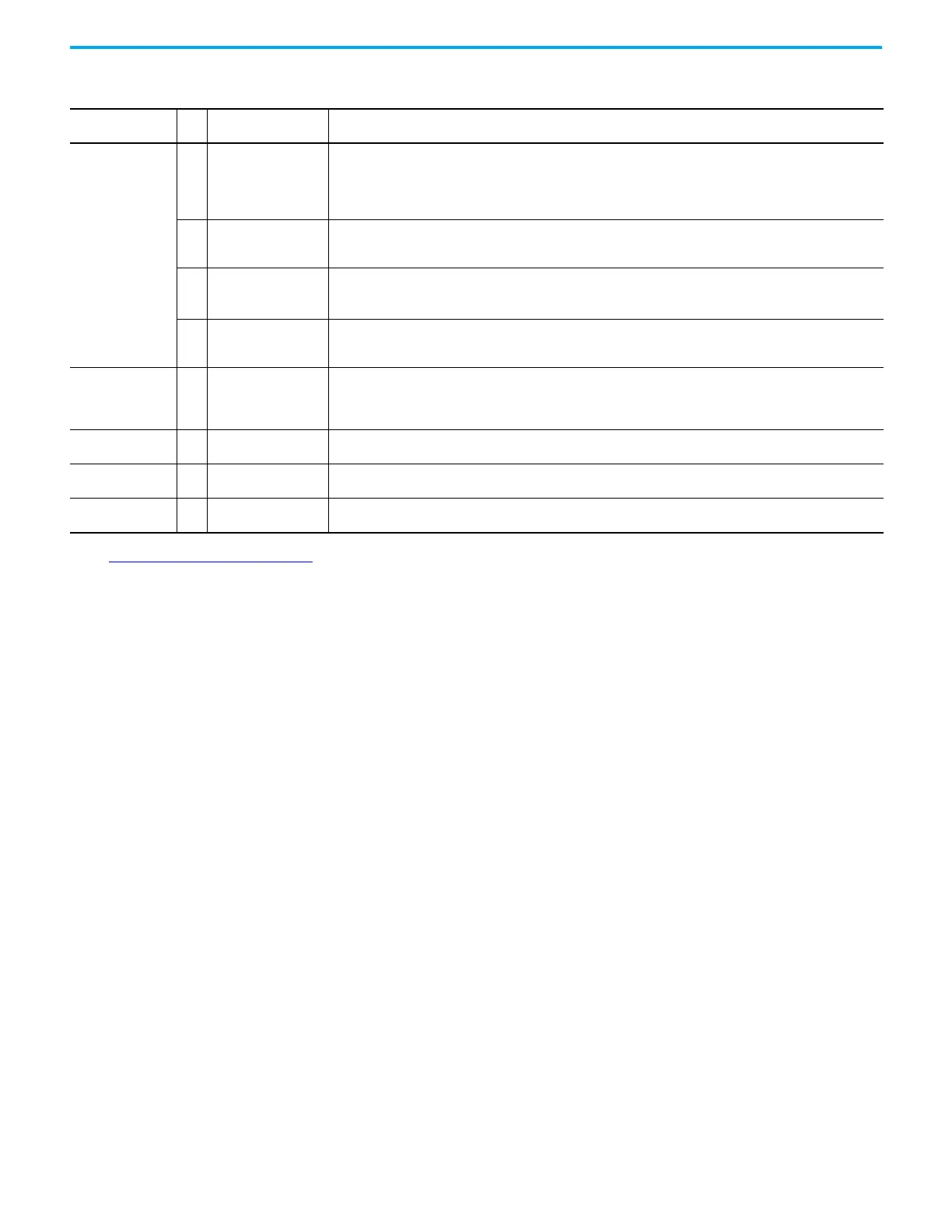
Table 118 - High-speed Position Capture, Additional Information
P5.039 (for DI9)
DI9CaptureControl
Bit Function Description
X
0 Enable capture function
When bit 0 = 1, and ID330 (P5.038) > 0, data capturing starts and DO.CAP_OK signal is off. The value of ID330 (P5.038)
decrements as data capture continues.
When ID330 (P5.038) = 0 it means that data capture is complete. When the data capturing is completed, the
DO.CAP_OK signal is on, and bit 0 is cleared to 0.
If bit 0 is already 1, the written value must not be 1; you have to write 0 to disable the Capture function.
1
Reset the axis position
when first data is
captured
When bit 1 = 1, after the first data is captured, the Capture axis position is set to the value of ID368 (P5.076)
DI9FirstCaptureResetPosition.
2
Enable Compare
function after the first
data is captured
(1)
When bit 2 = 1, when the first data is captured, the Compare function is enabled. (ID351.X (P5.059.X) CompareControl
bit 0 = 1 and ID350 (P5.058) CompareRemainedCount resets to the previous setting amount). If the Compare function
is already enabled, then this bit function is ignored.
3
Execute specific PR
after the last data is
captured
When bit 3 = 1, the drive executes the specific PR once data capture is complete
(2)
.
Y – Source of capture axis
0: Disabled
1: Auxiliary encoder (Aux)
2: Pulse command (I/O)
3: Main encoder of motor (MFB)
Z–Trigger logic
0: N.O. (normally open)
1: N.C. (normally closed)
U–
Minimum trigger
interval
–
DC
The specific
PR#1…PR#99
–
(1) Compare function only supported in first capture.
(2) See Use IO Mode and Add-On Instruction on page 357. PR mode operation is fixed with DI9 using PR#50 and DI10 using PR#60

 Loading...
Loading...









