294 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 11 Motion Control in PR Mode
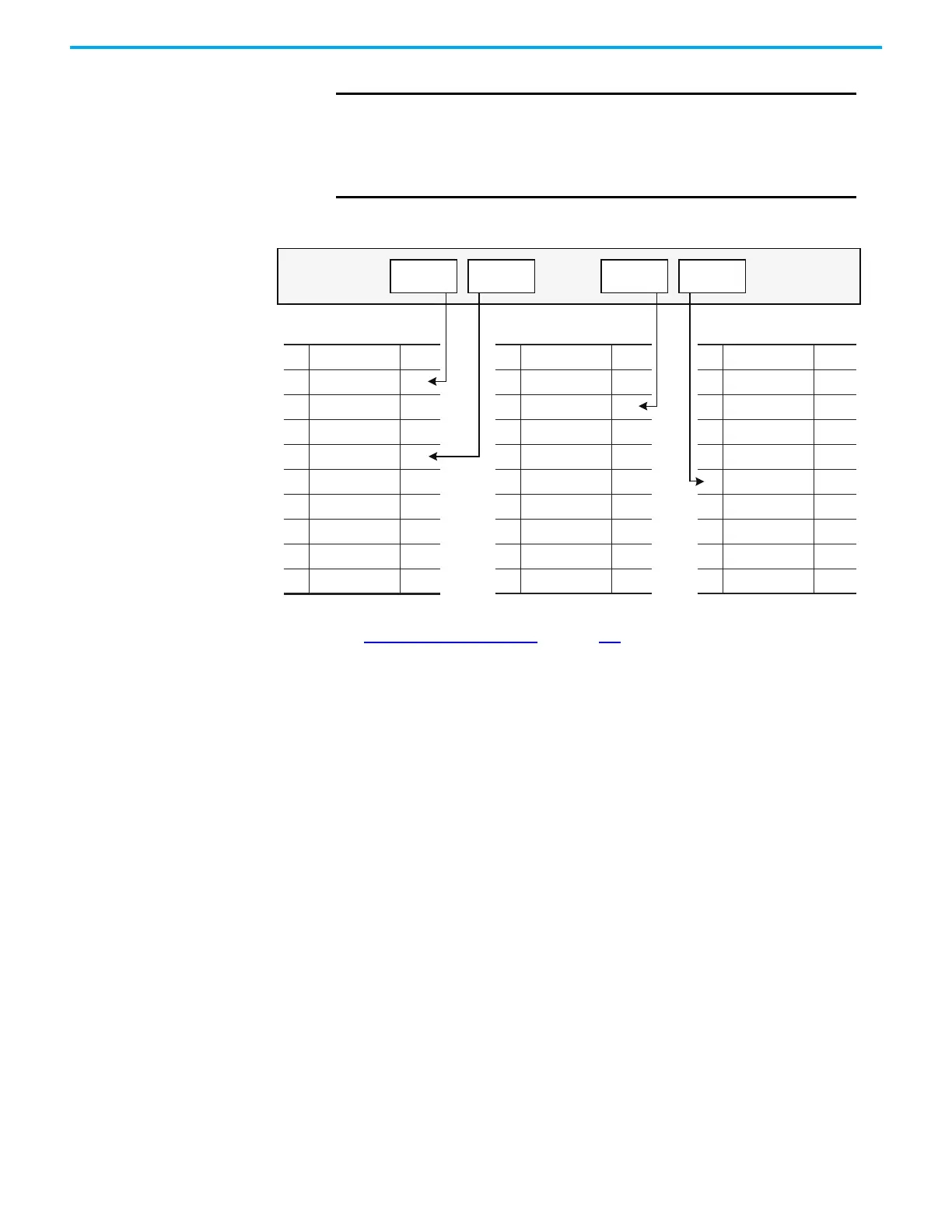
Figure 103 - Shared Parameter Data of PR Commands
See Speed and Time Settings on page 343 for information about configuring
the speed and time settings for these shared parameters.
Monitoring Variables in PR Mode
The Kinetix 5100 drive provides different options to monitor the drive
indexing operation in PR Mode. The Monitoring Status, Scope function, or
most accurate is the Digital Inputs/Outputs. You can use these options to
create timing information that can help understand how the drive indexing is
operating.
PR Mode provides the following four monitoring variables for servo command
and feedback.
• Command position (PUU): The target position of the motion command
generated per scan cycle during servo operation (updated every 1 ms),
simplified as Cmd_O (Command Operation).
• PR command end register: The target position of the PR command,
simplified as Cmd_E (Command End). When a command is triggered,
the servo drive calculates the target position and then updates the PR
command end register.
• Feedback position (PUU): The feedback position (coordinates) for the
motor, simplified as Fb_PUU (Feedback PUU).
• Position error (PUU): The deviation between the command position
(PUU) and the feedback position (PUU), simplified as Err_PUU (Error
PUU).
EXAMPLE
If acceleration time is set to 50 ms, this means when the target
speed of motion command is 3000 rpm, then the required duration
is 50 ms.
If the target speed of the motion command is 1500 rpm, then the
acceleration time is 25 ms.
PR Command Setting
ACC:1 DEC:4 DLY:2 SPD:5
Acceleration / Deceleration Time
(ACC/DEC)
0 ID312 (P5.020) 200
1 ID313 (P5.021) 300
2 ID314 (P5.022) 500
3 ID315 (P5.023) 600
4 ID316 (P5.024) 800
5 ID317 (P5.025) 900
6 ID318 (P5.026) 1000
……
14 ID326 (P5.034) 50
15 ID327(P5.035) 30
0 ID332 (P5.040) 0
1 ID333 (P5.041) 100
2 ID334 (P5.042) 200
3 ID335 (P5.043) 400
4 ID336 (P5.044) 500
5 ID337 (P5.045) 800
6 ID338 (P5.046) 1000
……
14 ID346 (P5.054) 5000
15 ID347(P5.055) 5500
Delay Time (DLY) Target Speed (SPD)
0 ID352 (P5.060) 20.0
1 ID353 (P5.061) 50.0
2 ID354 (P5.062) 100.0
3 ID355 (P5.063) 200.0
4 ID356 (P5.064) 300.0
5 ID357 (P5.065) 500.0
6 ID358 (P5.066) 600.0
……
14 ID366 (P5.074) 2500.0
15 ID367(P5.075) 3000.0

 Loading...
Loading...









