Rockwell Automation Publication 2198-UM004D-EN-P - December 2022 165
Chapter 7 Configure the Drive with KNX5100C Software
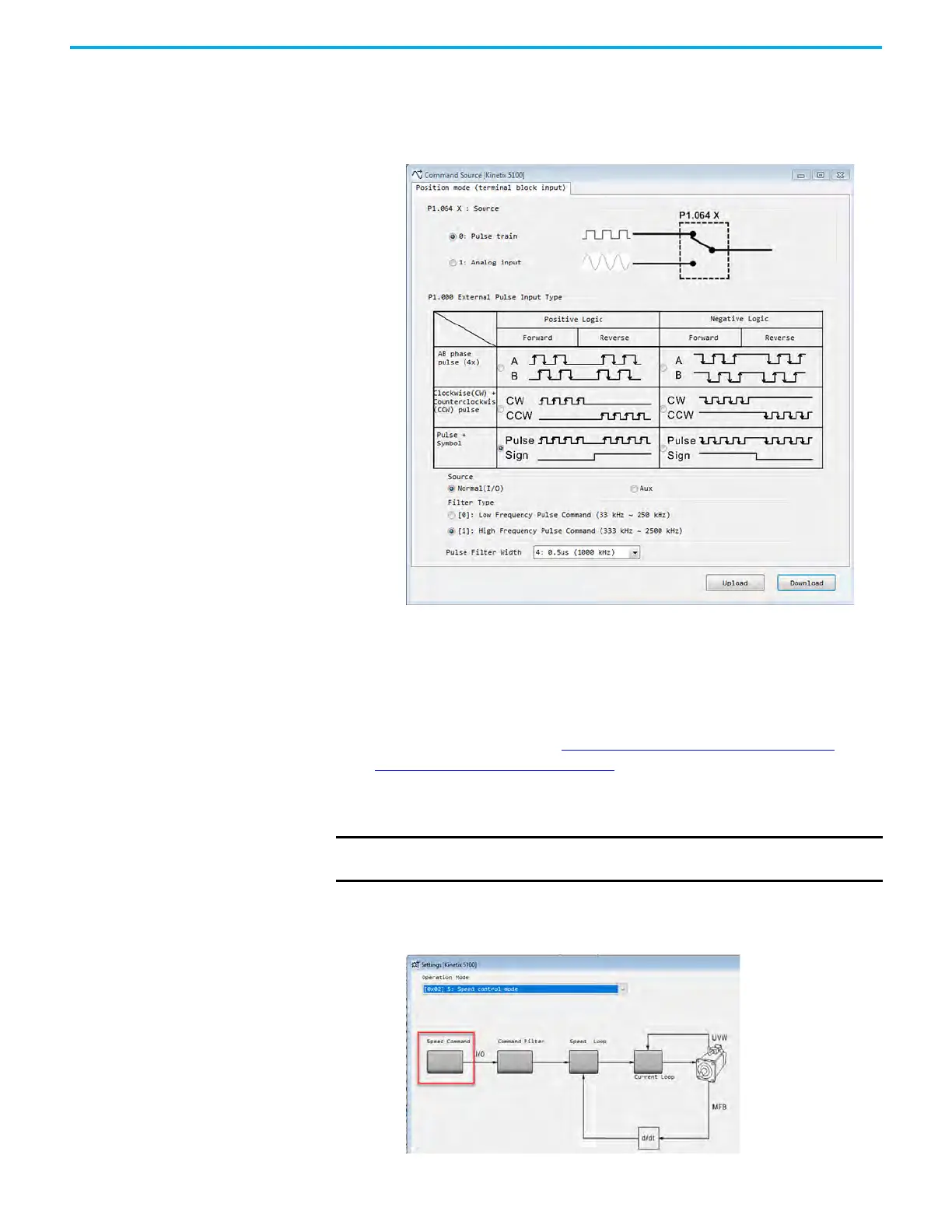
2. On the Position Mode tab, select either Pulse Train or Analog Input as the
position command source.
3. If you select Pulse train, you can specify the External Pulse Input Type,
Source (the drive port from where the command originates), Filter Type,
and Pulse Filter Width.
4. Select the Source to be used.
When the Control Mode is PT (Position Terminal), the source indicates
which port the Master Pulses originate.
5. Click Download to download any changed parameters to the servo drive.
For more information, see PT Mode (Position Command with I/O
Terminal Block Input) on page 237.
Configure the Command Source for Speed Mode (-S mode)
1. From the Function List, choose Start>Kinetix 5100> Setting and select
the Operating Mode as S:Speed Control Mode.
2. Click the Speed Command box.
IMPORTANT
The Speed Mode tab is visible if you have configured a dual or
multiple operation mode, such as PT/S mode.

 Loading...
Loading...









