180 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 7 Configure the Drive with KNX5100C Software
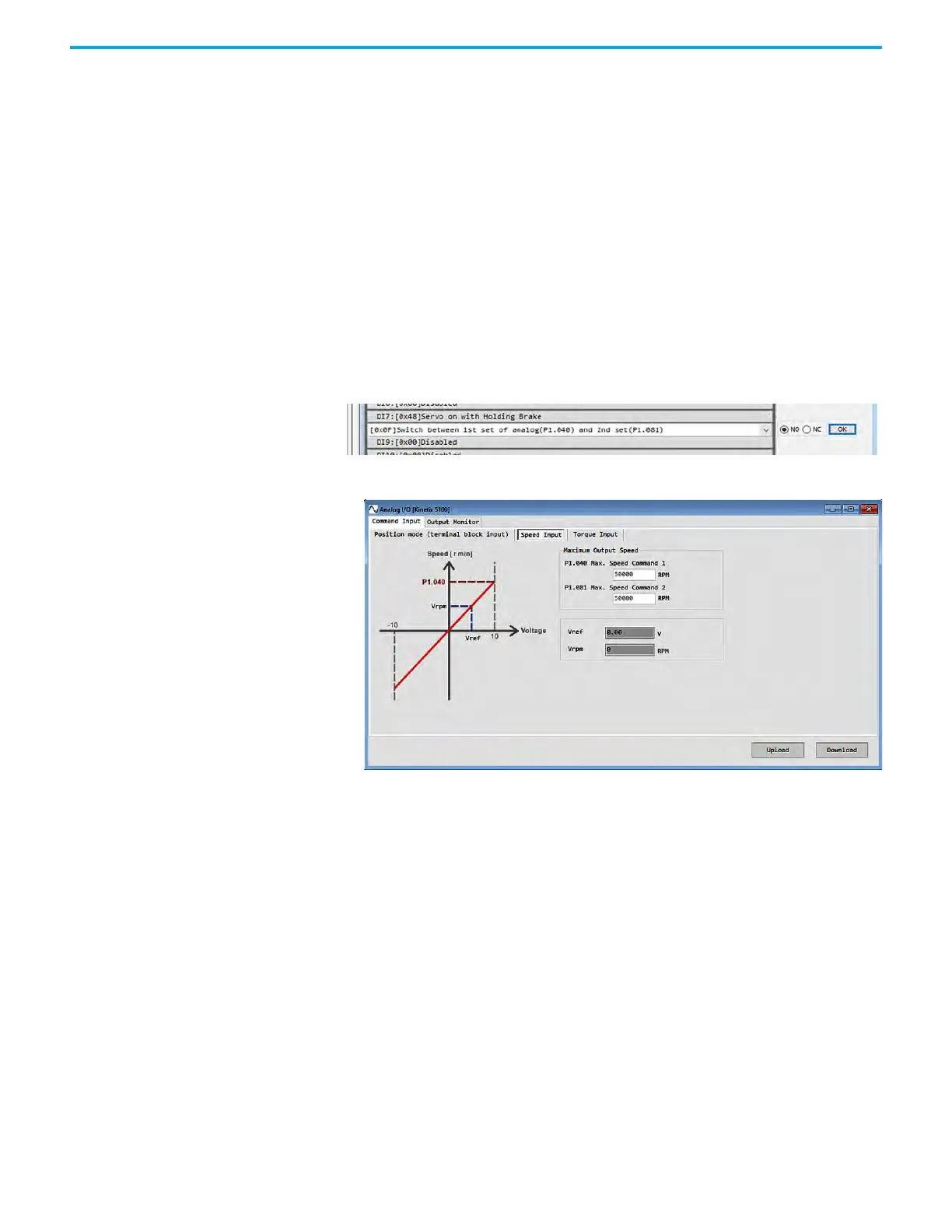
Speed Input Tab
This mode is useful when you want to relate an analog voltage command to
motor speed. By using the analog input, you can relate an analog voltage to a
motor speed in RPM. Use this feature to define positive (up to +10V) or
negative (down to -10V) speed. The conversion of volts/motor RPM used here
is:
10V yields a maximum of P1.040 (Maximum Output Speed) RPM.
The volts/RPM is scaled using this formula. For example, if a ControlLogix®
1756-M02AE module was configured for Velocity mode, its analog output could
be used with this speed input for the Kinetix 5100 drive to provide full closed-
loop control.
On this tab, you can set the maximum output speed by using parameters
ID147 (P1.040) and ID679 (P1.081). Select the Max Speed value by using a
Digital Input.
Click Download to write any changed parameters to the servo drive.
Torque Input Tab
This mode is useful when you want to relate an analog voltage command to
motor torque. By using the analog input, you can relate an analog voltage to a
motor torque. Use this feature to define positive (up to +10V) or negative
(down to -10V) torque limits. The conversion of volts/motor torque used here
is: 10V yields a maximum of P1.041 (Maximum Output Torque). The volts/
motor torque % is scaled by using this formula. For example, if a ControlLogix
1756-M02AE module was configured for Torque mode, its analog output could
be used with this torque input for the Kinetix 5100 drive to provide full closed-
loop control.

 Loading...
Loading...









