70 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 3 Connector Data and Feature Descriptions
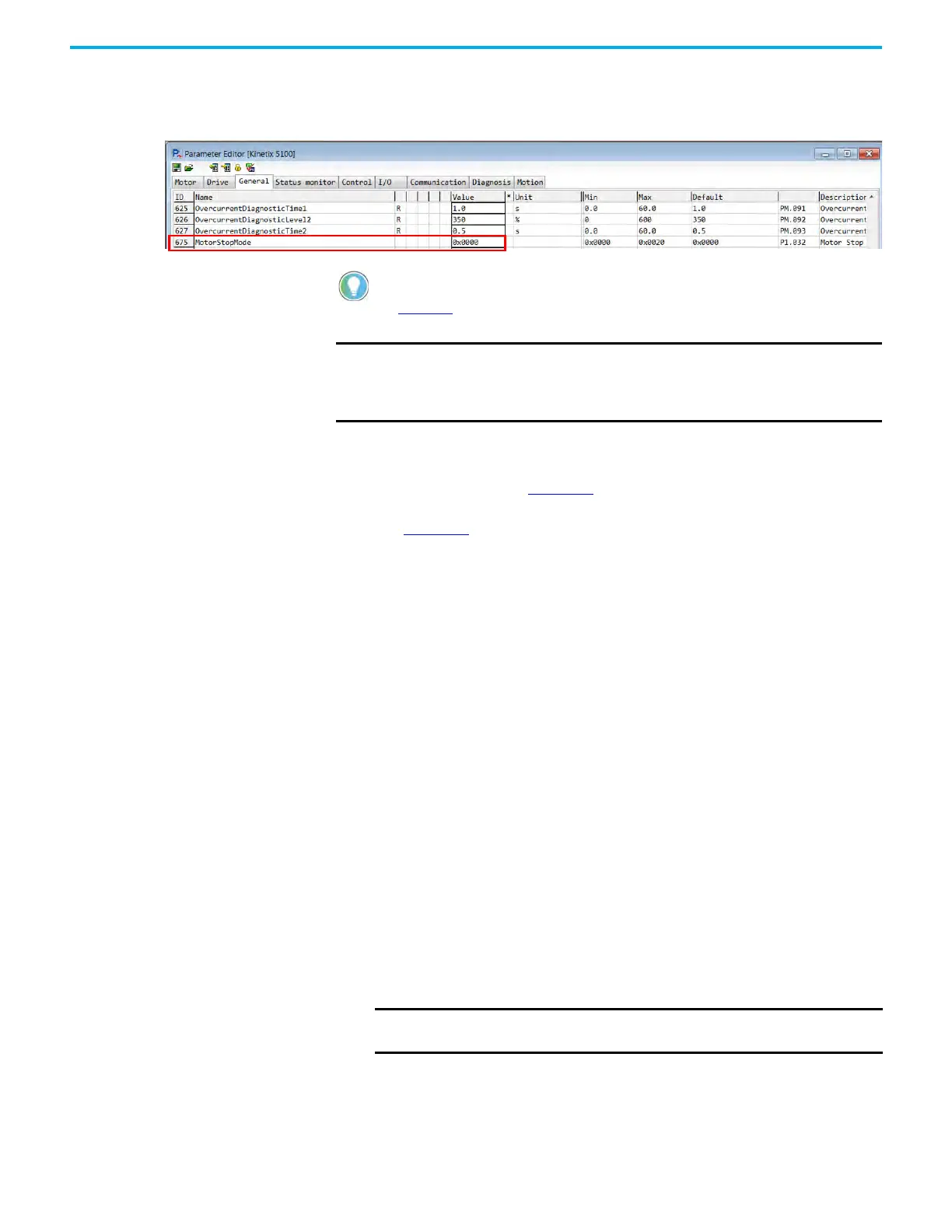
8. Verify that the MotorStopMode ID675 (P1.032) parameter is set to 0000.
Refer to Parameter Editor screen General parameter group.
Motor Brake Control Operation
Brake control is automatic. Figure 40 shows the timing of the brake control in
two different scenarios. Below is a description of the brake control operation
shown in Figure 40
:
• Brake Disengage (physically release the brake)
When the Servo On condition is ON (digital input ‘Servo On’ activates or
Add-On Instruction command raC_xxx_k5100_MSO is issued), ID149
(P1.042) DisengageDelayTime begins timing. When this delay expires,
the brake output is set and motion can occur.
•Brake Engage
This operation involves parameters ID145 (P1.038) ZeroSpeedWindow
rpm and ID150 (P1.043) EngageDelayTime.
ZeroSpeedWindow is a programmable value. When the motor speed
(rpm) is below the ZeroSpeedWindow value, the zero speed condition is
met.
When the Servo On condition is OFF (digital input 'Servo On' is removed,
Add-On Instruction command raC_xxx_k5100_MSF is issued, or the
drive faults), ID150 (P1.043) Engage Delay Time begins timing. The
ZeroSpeedWindow condition is actively evaluated. If the zero speed
condition occurs before the Engage Delay Time expires, the brake output
is OFF (scenario 2). If the zero speed condition is not met and the Engage
Delay Time expires, the brake output is OFF (scenario 1).
For vertical loads, MotorStopMode 0000 controls the motor to below the
ZeroSpeedWindow ID145 (P1.038) where the brake function executes (see
Figure 40
).
IMPORTANT
For MPL-A/B15xxx and MPL-A/B2xxx motors when MotorStopMode is
set at 0000 or 0020 (dynamic brake is enabled), there is a risk that
these motors can demagnetize during the stop. For these motors, set
MotorStopMode at 0010 (disable and coast).
IMPORTANT
If the ZeroSpeedWindow and Brake Delay parameters are not
set correctly, the brake can set while the motor is in motion.

 Loading...
Loading...









