216 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 9 Tuning
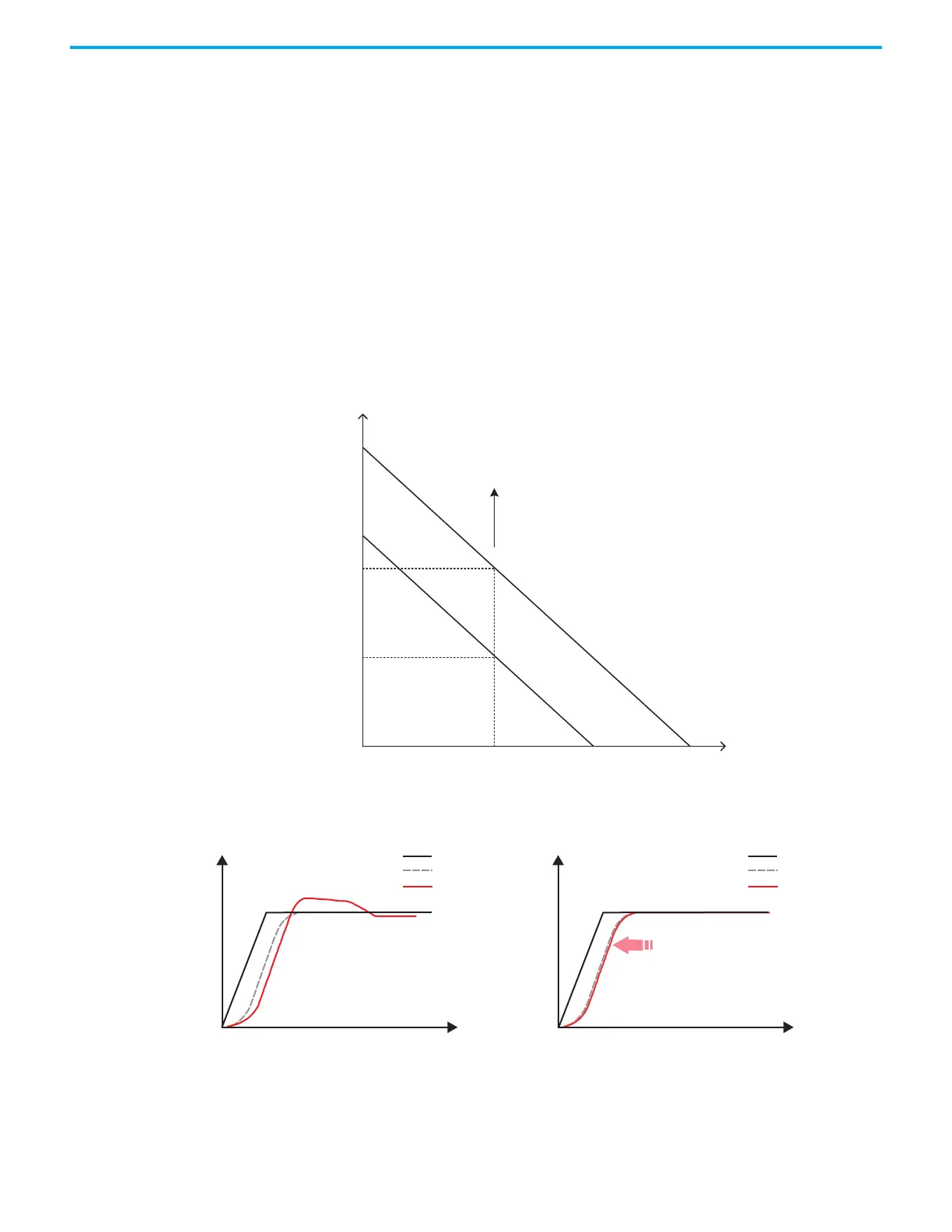
Setting ID216 (P2.031) SysGainResponseLevel
Parameter ID216 (P2.031) SysGainResponseLevel is provided to tune the servo
system in an easy and user-friendly way. When using the fixed inertia ratio
and increasing this parameter, the servo bandwidth is also increased. If
resonance occurs, lower the bandwidth levels and it is possible to use
resonance mitigation techniques to resolve the resonance. Adjust the
bandwidth level according to the actual application.
For instance, if the setting value of ID218 (P2.031) was 30, the bandwidth level
can be reduced to 28. When adjusting the value of this parameter, its
corresponding parameters is adjusted by the servo system, such as ID185
(P2.000) PositionProportionalGain and and ID189 (P2.004)
VelocityProportional Gain.
Figure 91 - Settings for SysGainResponseLevel
Command
Response
Feedback
Position
Time
Before
Command
Response
Feedback
Position
Time
After
Servo
Bandwidth
Level Increases
84 Hz
26 Hz
ID216 (P2.031) = 30
ID216 (P2.031) = 20
5 Inertia Ratio
ID144 (P1.037)

 Loading...
Loading...









