Rockwell Automation Publication 2198-UM004D-EN-P - December 2022 283
Chapter 10 Modes of Operation
To acquire the corresponding voltage output for the current motor speed, use
the following equations:
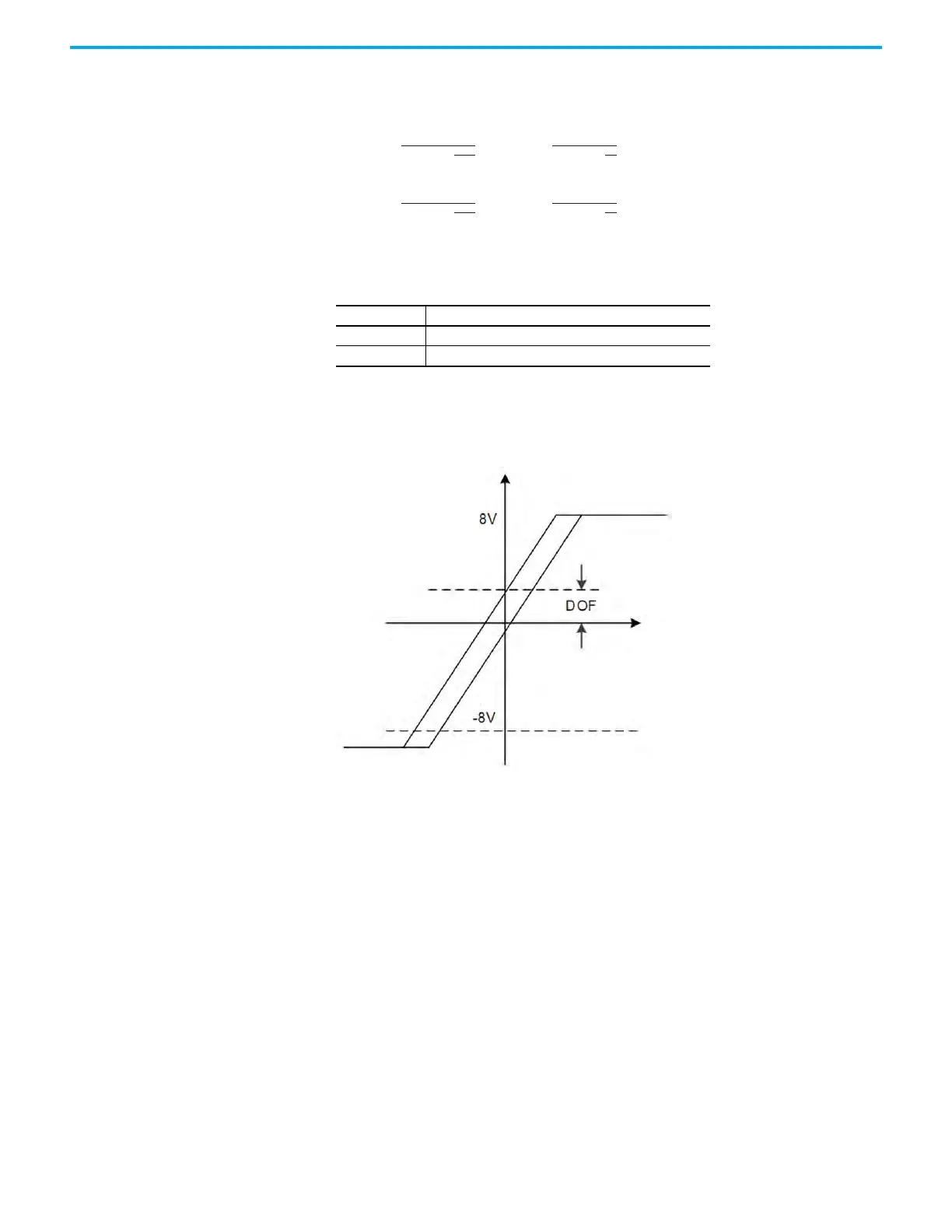
Voltage Drift
If analog voltage drift occurs, the voltage level defined as zero volts is different
from the measured zero volts point. To compensate for this offset,
AnalogOutput1Offset DOF1 ID290 (P4.020) and AnalogOutput2Offset DOF2
ID291 (P4.021) can be used to calibrate the offset voltage output.
Table 108 - Relevant Parameters
Parameter Name
ID290 (P4.020) AnalogOuput1Offset
ID291 (P4.021) AnalogOuput2Offset
Current speed
Max speed x
=
20
100
8V x x 100%
300 rpm
5000 rpm x
P1.004
100
MON1 =
For a motor current speed of 300 rpm:
For a motor current speed of 900 rpm:
Current speed
Max speed x
=
20
8V x x 100%
900 rpm
5000 rpm x

 Loading...
Loading...









