314 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 11 Motion Control in PR Mode
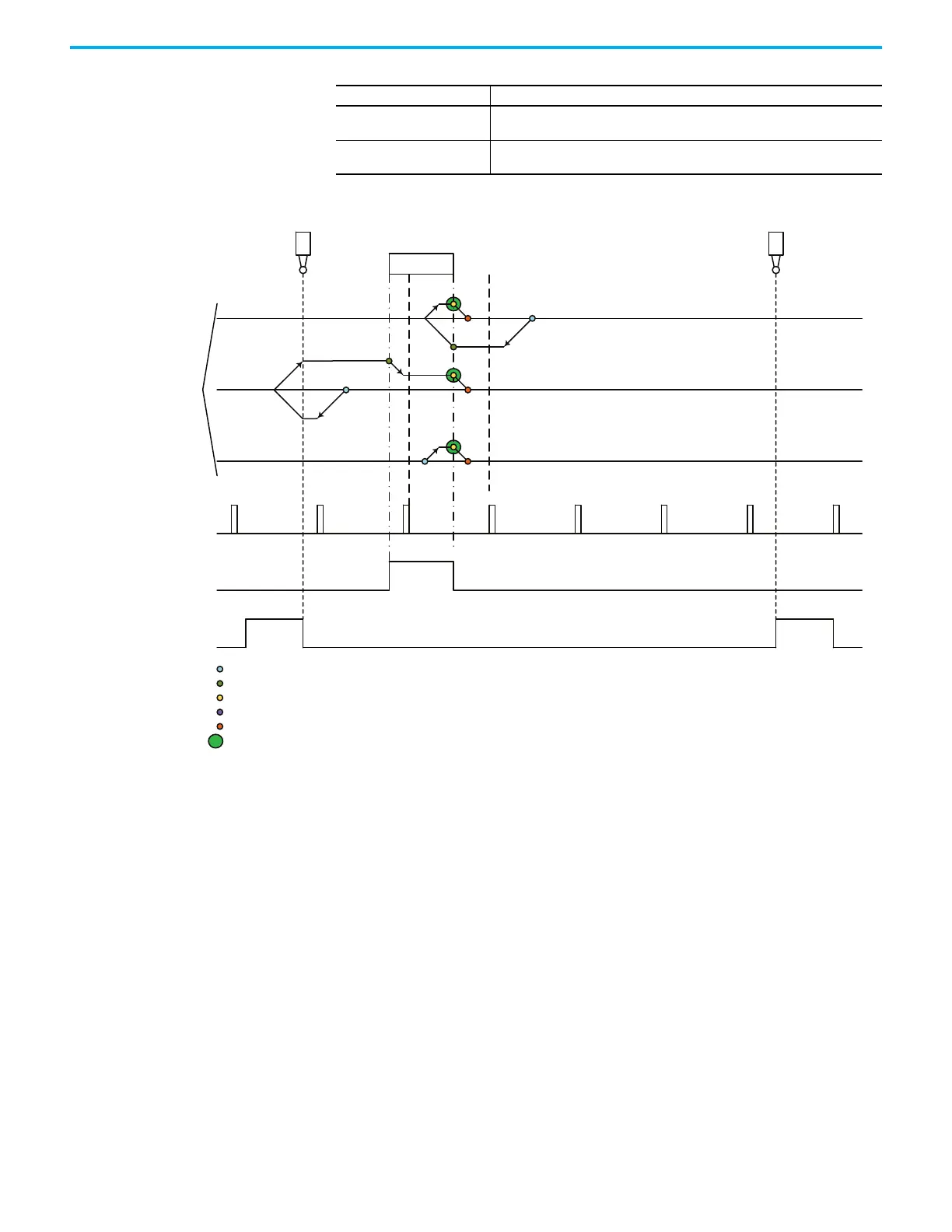
Figure 120 - Homing to Reverse ORG OFF to ON (Rising Edge condition) - Homing Method 16 and 17
Homing Method - IO Mode Homing Method - Description
16
Homing in reverse direction, ORG: OFF to ON as homing origin, Do not look for Z
pulse, Shows error when encounter limit. Home Position is set at Green dot.
17
Homing in reverse direction, ORG: OFF to ON as homing origin, Do not look for Z
pulse, Reverse direction when encounter limit. Home Position is set at Green dot.
NL PL
ORG
HS
LS
HS
LS
HS
LS
Start Point
ORG (Home Input) OFF to ON
ORG (Home Input) ON to OFF
Z-Pulse ON
End Point
Home Position Set
Homing Method: 16 and 17
Negative Limit (NL)
Positive Limit (PL)
Start Point 1
Start Point 2
Start Point 3
ORG Signal
Z-Pulse
Limit Signal
ORG
ORG = Home Limit
HS = High Speed (1st Speed)
LS = Low Speed (2nd Speed)

 Loading...
Loading...









