318 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 11 Motion Control in PR Mode
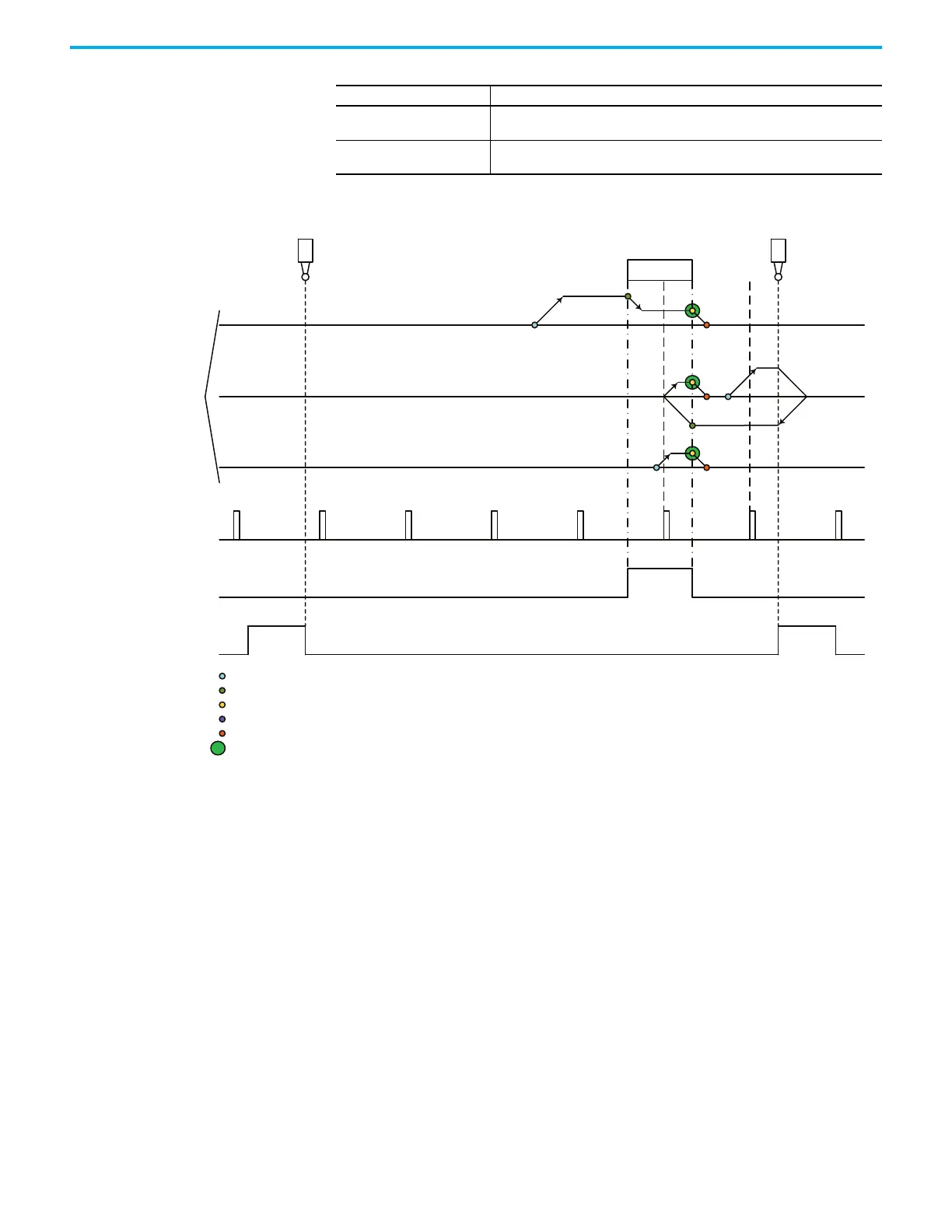
Figure 124 - Homing to Forward ORG ON to OFF (Falling Edge condition)- Homing Method 26 and 27
Homing Method - IO Mode Homing Method - Description
26
Homing in forward direction, ORG: ON to OFF as homing origin, Do not look for Z
pulse, Shows error when encounter limit. Home Position is set at Green dot.
27
Homing in forward direction, ORG: ON to OFF as homing origin, Do not look for Z
pulse, Reverse direction when encounter limit. Home Position is set at Green dot.
NL PL
ORG
HS
LS
HS
HS
LS
LS
Homing Method: 26 and 27
Negative Limit (NL)
Positive Limit (PL)
ORG
Start Point 1
Start Point 2
Start Point 3
Start Point
ORG (Home Input) OFF to ON
ORG (Home Input) ON to OFF
Z-Pulse ON
End Point
Home Position Set
ORG Signal
Z-Pulse
Limit Signal
ORG = Home Limit
HS = High Speed (1st Speed)
LS = Low Speed (2nd Speed)

 Loading...
Loading...









