Rockwell Automation Publication 2198-UM004D-EN-P - December 2022 421
Chapter 13 Kinetix 5100 Safe Torque Off (STO) Feature
The Safety Relay output (14) in Figure 230 is wired to a 24V DC input module in
the controller and evaluated in the logic. The Motion Operation Add-On
Instructions are used to stop and disable the motor before the Safety Relay
Dwell Time expires.
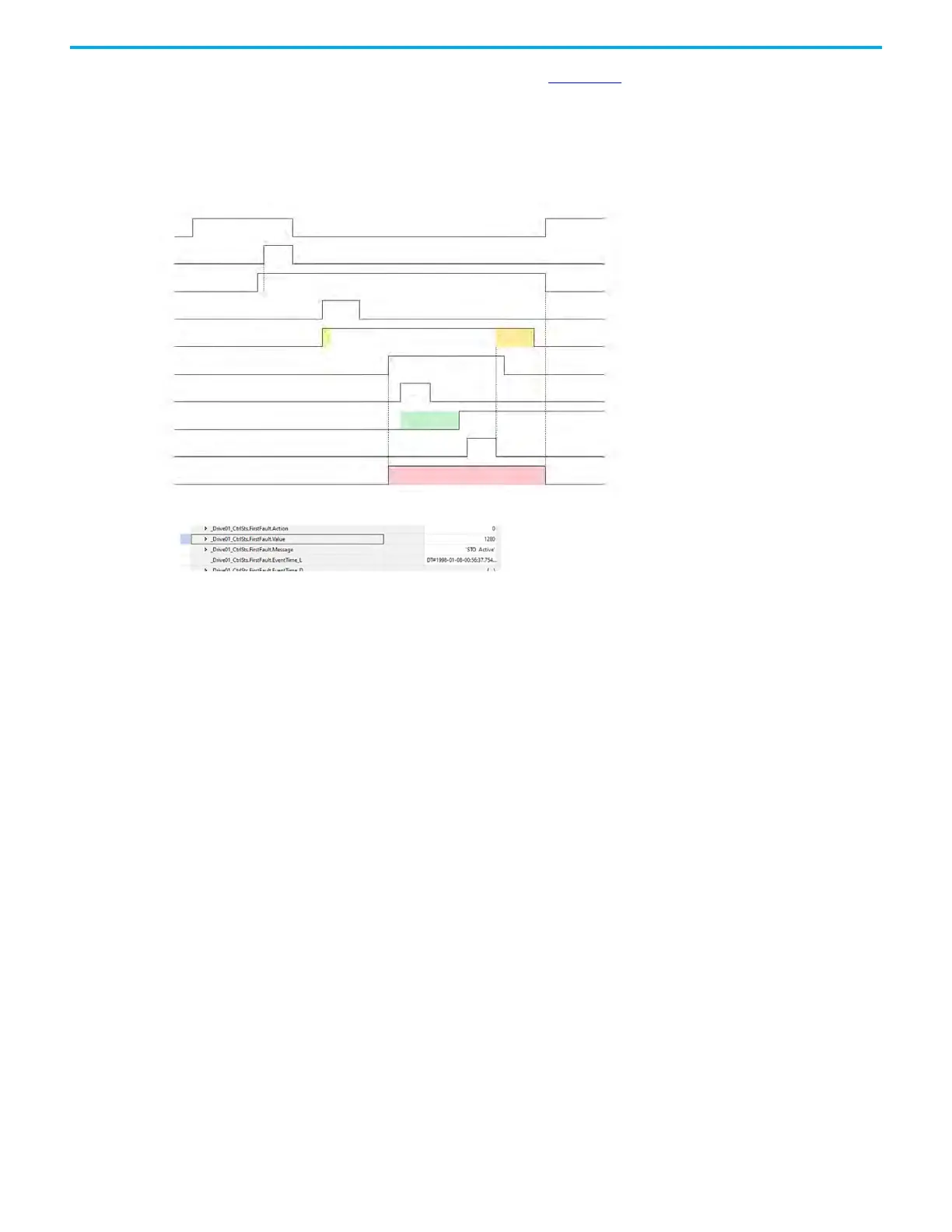
Figure 233 - Single Axis Timing Diagram: Category 1 - Using IO Operation Mode
STO Active Alarm
(Sts = 1280)
raC_xxx_K5100_MAFR
Safe Torque Off Inputs
(38+48)
raC_xxx_K5100_MSO
_Drive01_CtrlSts_Active
STO Request
Safety Relay Output (14)
Application Logic
raC_xxx_K5100_MAS
_Drive01_CtrlSts.ZeroSpee
Application Logic
raC_xxx_K5100_MSF
Safety Relay Delay
Timing
Stopping
Safety Relay Dwell Time
Brake Engage Timing
Brake Release Timing

 Loading...
Loading...









