428 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 14 Absolute Position Recovery
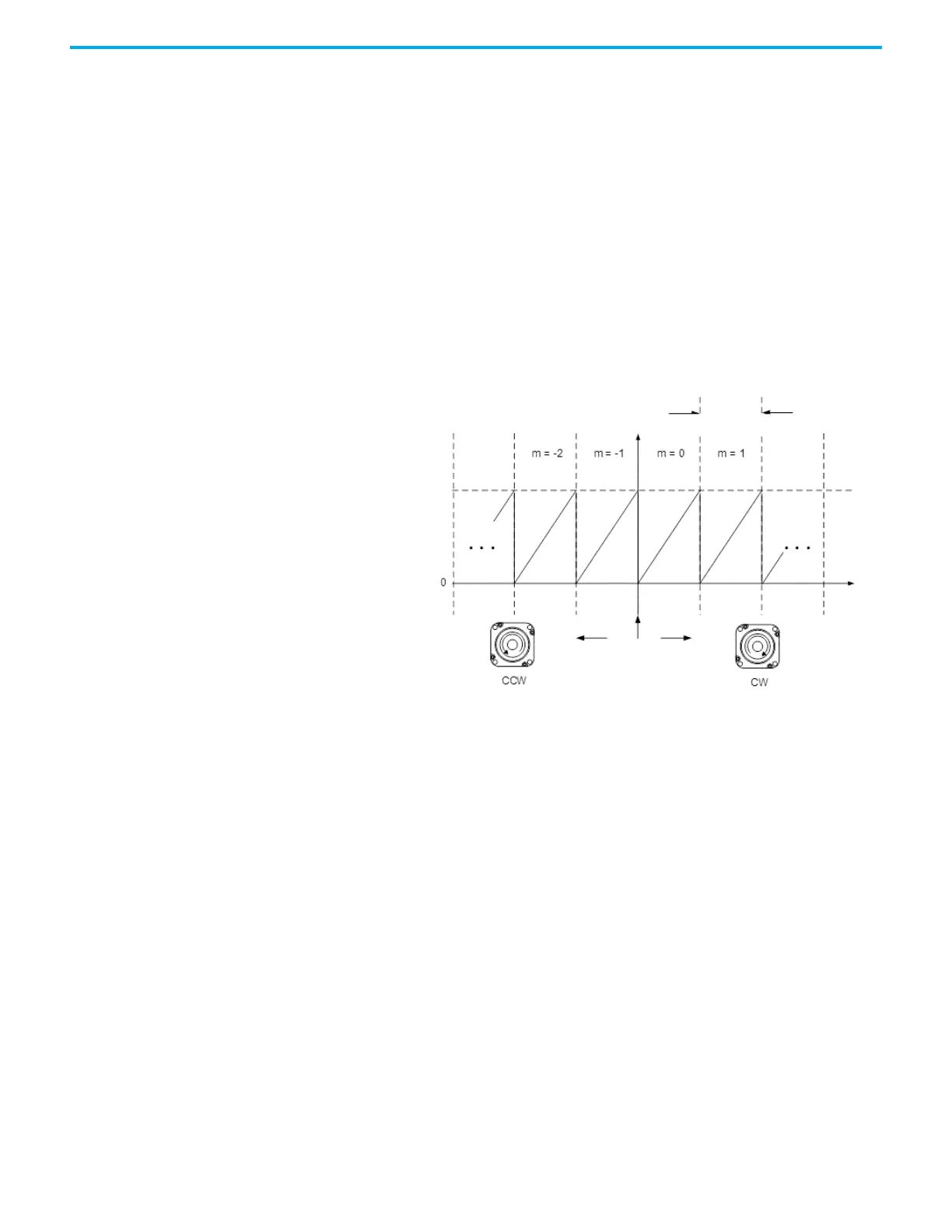
In these examples, an example Kinetix TLP motor with the encoder resolution
of 16777216 (single turn) is used. In addition to the cycle counter
(MultiTurnAbsPosition ID110 P0.051), there are 16,777,216 pulses (0…16777215)
in one rotation. Pay attention to the motor's running direction.
Pulse number = m (cycle number) x 16777216 + pulse number (0 … 16777215). The
conversions between pulse number and PUU are as follows:
When the rotation direction is defined as clockwise (CW) in ID117
(P1.001.Z=0), then the PUU number =
pulse number × [ID152 (P1.045) / ID151 (P1.044)] + ID398 (P6.001).
When the rotation direction is defined as counter-clockwise (CCW) in ID117
(P1.001.Z=1), then the PUU number =
(-1) × pulse number × [ID152 (P1.045) / ID151 (P1.044)] + ID398 (P6.001).
0…16777215
0…16777215 0…16777215
0…16777215
0…16777215 0…16777215
16777215 - 1
Pulse
MultiTurnAbsPosition
ID110 (P0.051)
Pulse number
in one turn
ID111 (P0.052)

 Loading...
Loading...









