434 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 15 Programming via Drive Parameters
Table 135 - Digital Inputs
Setting DI Description Trigger Method Control Mode
0x01
Servo On
When this DI is on, servo is activated (Servo On). When this DI is off, the servo is deactivated the default
deceleration profile is dynamic brake type (similar to a current decel profile). Always configure this DI as N.O.
Level triggered All except I/O
0x02
Alarm/Fault Reset
When the DI transitions on, any faults are cleared. If the fault is still active, this reset does not clear the fault.
Rising-edge triggered All
0x03
Gain Switching
In speed and position mode, when this DI is on and GainSwitchingSelection ID212 (P2.027) X= 1 and the Gain
Switching Method = 0, the original gains are multiplied by Position /Velocity Gain Changing Rate ID186/ID190 (P2.001/
P2.005).
Level triggered PT, PR, S
0x04
Pulse Clear
This input can be configured for Edge/Level trigger by changing PulseClearMode ID233 (P2.050). When this input is
on, any accumulated position error is cleared (set to zero).
Rising-edge triggered,
level triggered
PT
0x05
Zero Speed Threshold (ZClamp)
When the speed is below the setting of ZeroSpeedWindow ID145 (P1.038), the motor stops moving when this DI is on.
See Zer
o Speed Threshold Function on page 249 for additional information.
Level triggered S, I/O (Speed)
0x06
Reverse Direction of Input Command
In speed mode, the input command reversed when this DI is on.
Level triggered
S, Sz, T, I/O
(Speed, Gear
Mode )
0x08
Command Triggered
In PR Mode, after selecting the PR command (POS0…POS6), this DI is the signal to carry out the execution of the
selected PR. Once the rising edge transition occurs, the selected PR will execute. This DI needs to transition off to
on for execution.
Rising-edge triggered PR
0x09
Torque Limit
When this DI is on and VelocityTorqueLimitAction ID118 (P1.002 Y) is enabled, the selected torque limit is applied.
Level triggered
PT, PR, S, I/O
(Position, Index,
Gear, Speed)
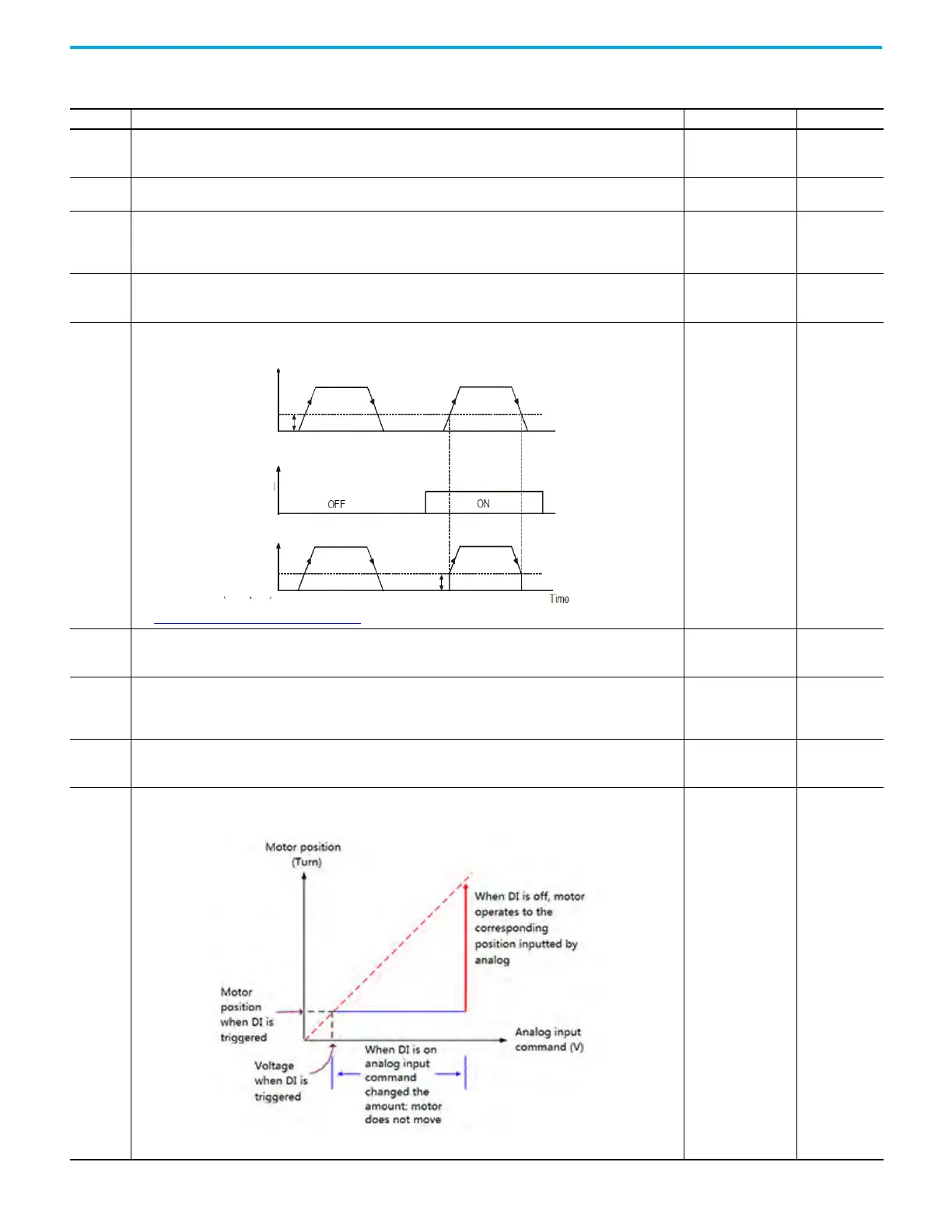
0x0C
Latch Function of Analog Position Command
While this DI is on, the motor is held at its current position, even if there is a change in command. When this DI is
off, the motor completes the command that occurred while the motor was stationary.
Level triggered PT, I/O (Gear)
Speed
command
Setting value of
ID145 (P1.038)(
zero speed)
ZCLAMP
input signal
Motor Speed
Setting value
of ID145 (P1.038)
(zero speed)

 Loading...
Loading...









