512 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Appendix C Use Add-On Instructions
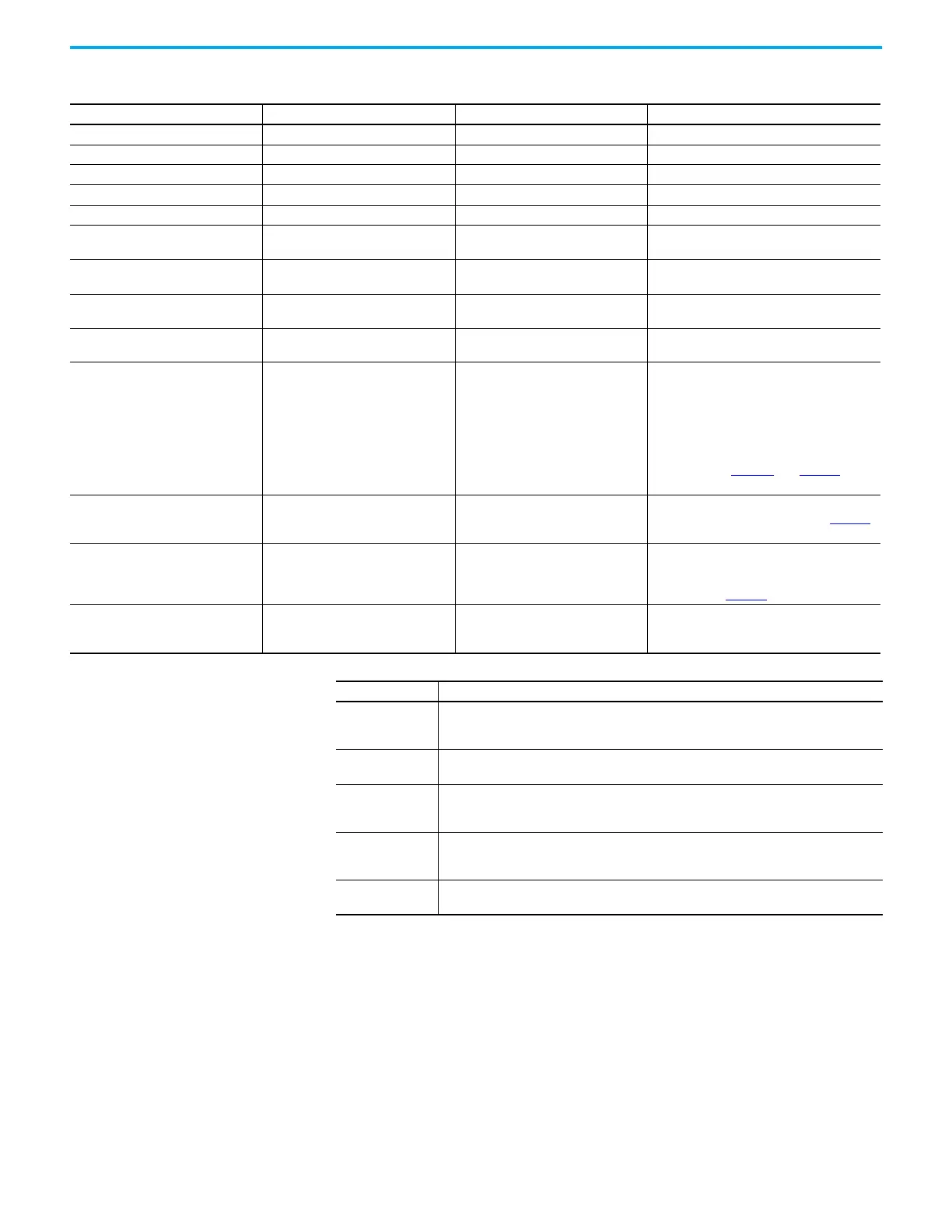
Operands
Operand Type Format Description
Instance raC_xxx_K5100_MAM Tag Unique instance of the MAM Add-On Instruction
Ref_Ctrl_Cfg raC_UDT_Itf_PowerMotionSA_Cfg Tag Interface for Ctrl_Cfg of the Device Object
Ref_Ctrl_Set raC_UDT_Itf_PowerMotionSA_Set Tag Interface for Ctrl_Set of the Device Object
Ref_Ctrl_Cmd raC_UDT_Itf_PowerMotionSA_Cmd Tag Interface for Ctrl_Cmd of the Device Object
Ref_Ctrl_Sts raC_UDT_Itf_PowerMotionSA_Sts Tag Interface for Ctrl_Sts of the Device Object
Set_PositionReference REAL Immediate or Tag
Set the Target Distance/Position Reference
(PUU) Range: -2,147,483,648…+2,147,483,647
Set_SpeedReference REAL Immediate or Tag
Units are 0.1 rpm for rotary motors
Range: -80,000…+80,000
Set_AccelReference REAL Immediate or Tag
Units are 0.1 rpm/s for rotary motors
Range: 458…30,000,000
Set_DecelReference REAL Immediate or Tag
Units are 0.1 rpm/s for rotary motors
Range: 458 …30,000,000
Set_MoveType INT Tag
Specify the type of move:
0 = Absolute
1 = Incremental
2 = Rotary Shortest Path
3 = Rotary Positive
4 = Rotary Negative
7 = Relative
8 = Capture (see page 337
, and page 514 for
details)
Set_PositionCommandOverride BOOL Tag
0 = Do not interrupt previous movement
1 = Interrupt previous movement (see page 514
for details)
Set_PositionCommandOverlap BOOL Tag
0 = Current movement is not overlapped with
next
1 = Current movement is overlapped with next
movement (see page 514
for details)
Set_CapturedPositionSelect BOOL Tag
0 = First High Speed Capture (triggered by DI9)
1 = Second High Speed Capture (triggered by
DI10)
Mnemonic Description
Sts_EN (Enable)
This bit is set when the rung makes a false-to-true transition and the message transaction
to Index is initiated and in process. It remains high until the rung-in condition is false and no
faults are active.
Sts_DN (Done)
This bit is set when the rung makes a false-to-true transition and the message transaction
to Index the drive (Sts_EN) is complete.
Sts_ER (Error)
This bit is set when the rung makes a false-to-true transition and there is an error that has
occurred with the instruction. (This instruction error can be as a result of a fault on the drive
itself). See Sts_ERR for details on the cause of the error.
Sts_IP (In Progress)
This bit is set when the rung makes a false-to-true transition, the Index message transaction
is successful, and the motor begins to move. This bit remains set as the motor is executing
the index.
Sts_PC (Process
Completed)
This bit is set when the rung makes a false-to-true transition, the Index message transaction
is successful, and the motor reaches the Target position.

 Loading...
Loading...









