120 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 6 Use the Keypad Interface
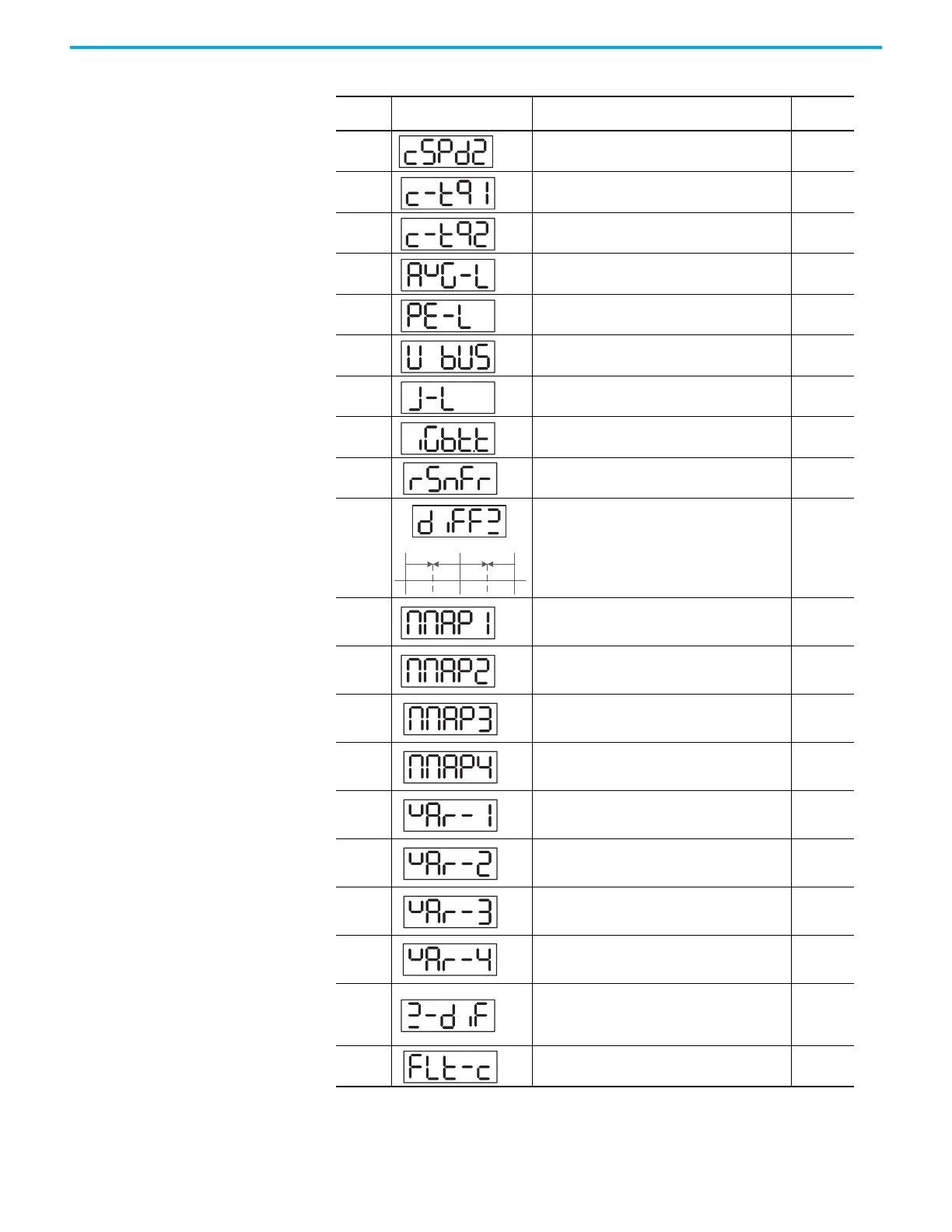
9 Speed command. rpm
10 Torque command. Volt
11 Torque command. %
12 Average torque. %
13 Peak torque. %
14 Main circuit voltage. Volt
15
Load/motor inertia ratio.
If 13.0 is displayed, the actual inertia is 13.
1 time
16 IGBT temperature. °C
17
Resonance frequency. Low byte is the first resonance
and high byte is the second resonance.
Hz
18
The absolute pulse number of encoder Z phase
equals the homing value, 0. The absolute pulse
number can be +5000 or -5000 pulses depending on
whether the motor rotates in a forward or reverse
direction.
—
19
Map parameter number 1 displays the content of
parameter ID55 (P0.025). Specify the map target by
using ID60 (P0.035).
—
20
Map parameter number 2 displays the content of
parameter ID56 (P0.026). Specify the map target by
using ID61 (P0.036).
—
21
Map parameter number 3 displays the content of
parameter ID57 (P0.027). Specify the map target by
using ID62 (P0.037).
—
22
Map parameter number 4 displays the content of
parameter ID58 (P0.028). Specify the map target by
using ID62 (P0.038).
—
23
Monitor variable number 1 displays the content of
parameter ID663 (P0.009). Specify the monitor
variable code by using ID668 (P0.017).
—
24
Monitor variable number 2 displays the content of
parameter ID664 (P0.010). Specify the monitor
variable code by using ID669 (P0.018).
—
25
Monitor variable number 3 displays the content of
parameter ID665 (P0.011). Specify the monitoring
variable code by using ID670 (P0.019).
—
26
Monitor variable number 4 displays the content of
parameter ID666 (P0.012). Specify the monitoring
variable code by using ID667 (P0.020).
—
27
Offset value between motor position and Z phase in
PUU unit. The value is 0 when the position overlaps
with Z phase. The greater the value, the greater the
offset.
User Unit
28 Current drive fault. —
Table 68 - Real Time Display Symbols (Continued)
Code
Real Time Displayed
Symbol
Description Unit

 Loading...
Loading...









