172 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 7 Configure the Drive with KNX5100C Software
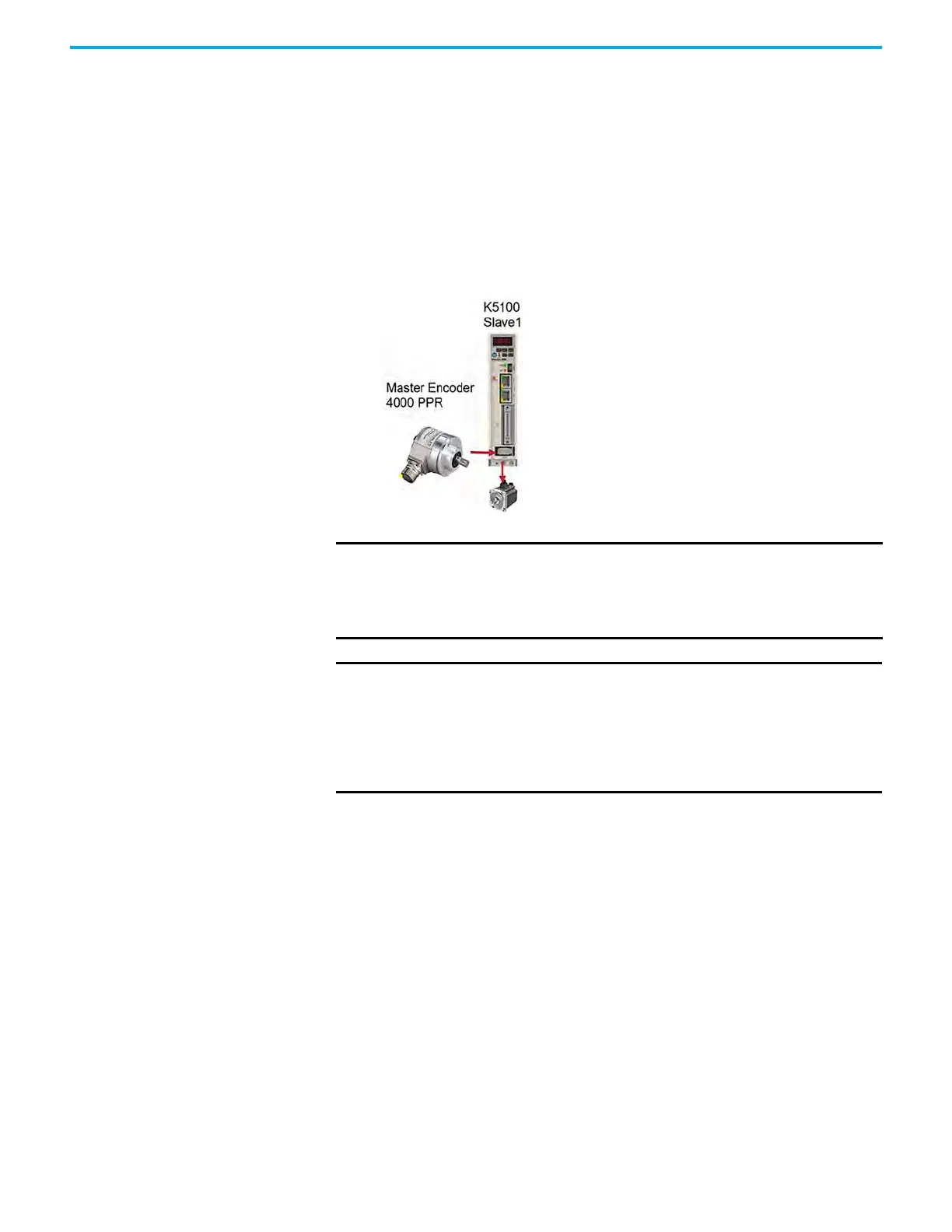
For example, the master in our system is a 4000 ppr encoder. Which means,
when the encoder makes one revolution, we expect the Slave1 drive to see 4000
pulses. Our application requirement is that we want to follow this encoder at a
1:2 relationship. Which means, when the master encoder moves 1 encoder
revolution, the motor rotates 2 revolutions. The Master PPR is not entered
anywhere, but it is required that we know this value. We calculate the E-Gear
Master Counts value knowing the Master PPR counts and the relationship we
want in the motor of Slave1. In our example, the Gear Ratio Master Counts =
2000, which means when Slave 1 sees 2000 pulses from the master, it rotates 1
revolution, and thus, as the master moves 4000 pulses (one rotation), Slave1
moves 2 rotations.
IMPORTANT When you change the E-Gearing ratio, you are affecting the position
scaling of your drive. So, you cannot expect to position correctly if you
change modes to a positioning mode when you are finished following
pulses. You must first re-establish a home, then set the E-Gear ratio
correctly for your application Position units.
IMPORTANT There is NO positioning ability while using the pulse follower function in
PT Mode. Furthermore, when the E-Gear ratio is changed in PT Mode,
and you change sub-modes back to a position-based mode (this means
using any other Opr_AOI), your position scaling changes. When you keep
a 'fixed' gearing ratio, then the positioning is maintained because the E-
Gear ratio values did not change. The drive follows pulses based on the
present value of the E-Gear ratio.

 Loading...
Loading...









