Rockwell Automation Publication 2198-UM004D-EN-P - December 2022 171
Chapter 7 Configure the Drive with KNX5100C Software
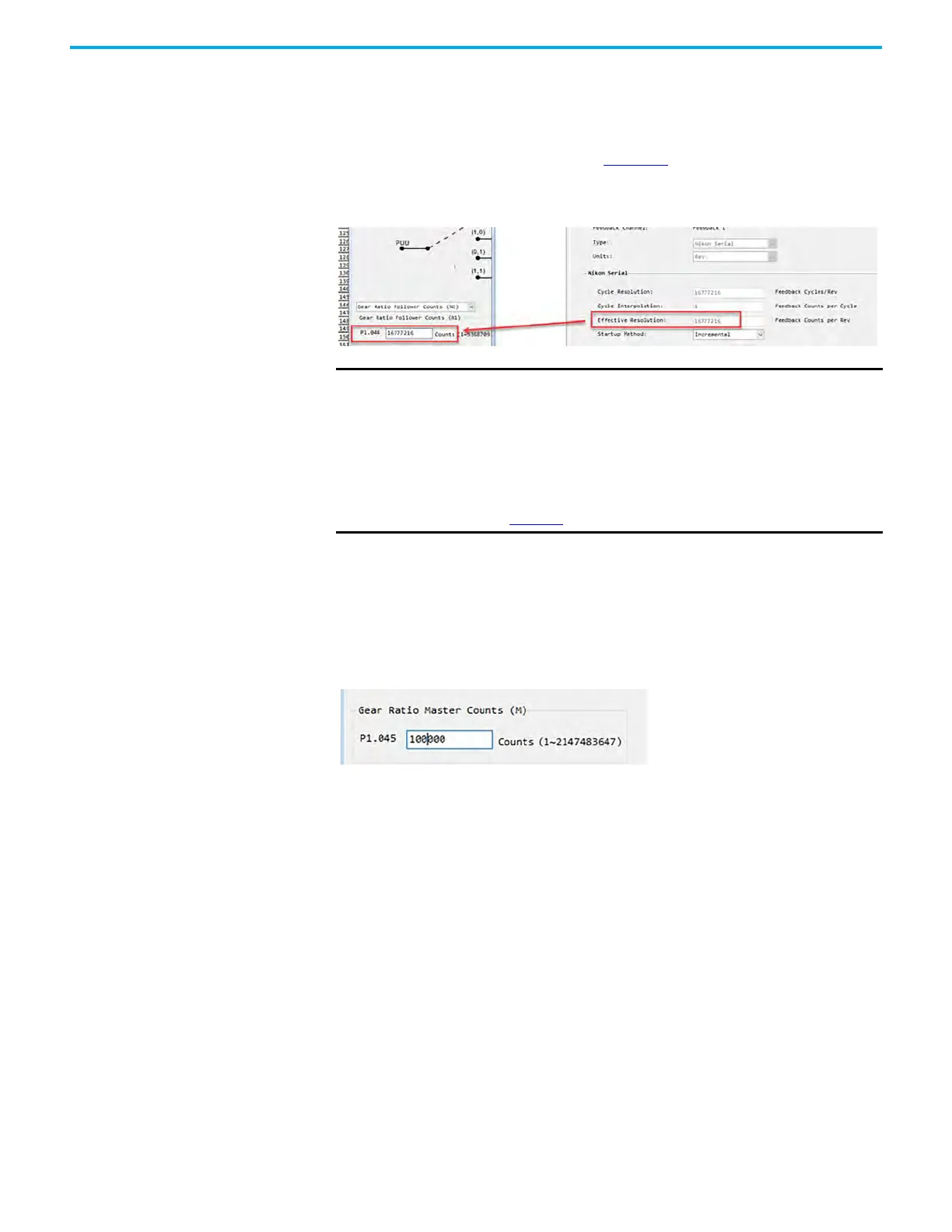
Setting Gear Ratio Follower Counts (ID151, P1.044)
The Gear ratio Follower Counts is sometimes called the numerator, because
when you look at how it is used in the drive, it is used to determine the internal
'ratio' of the drive (shown as 1677.72 in Figure 79
). Therefore, the E-Gear ratio
Follower equals the Effective Resolution of the motor feedback.
Figure 80 - Motor Selection > Feedback Dialog Box
Setting Gear Ratio Master Counts (ID152, P1.045) - PT Operation Mode
The Gear ratio Master Counts parameter ID152 (P1.045) is sometimes called the
denominator, which by default is defined as 100,000 counts/motor rev. You
can also use with IO mode - raC_xxx_K5100_MAG Add-On Instruction.
Figure 81 - Gear Ratio Master Counts
When the Follower counts is set equal to motor effective resolution, then the
Gear Ratio Master counts is desired counts/motor rotation. Desired counts, in
this case, are not used for position scaling, but are used to define the gearing
ratio. The Master counts are set based on the number of feedback pulses you
expect to receive from the Master source input and is used to define your
overall gearing relationship. So, this Master counts value is used to define the
effective 'ratio' of your gearing relationship.
IMPORTANT The numerator is always set as the Effective Resolution. We use Master
counts (denominator) to represent your ratio (depending on your
Operation Mode). When using DI.GNUM0 and DI.GNUM1 for different gear
ratios, we are changing the Slave/Follower Counts entry. DI.GNUM0/1
can only be entered as Follower Counts (ID236…ID238, P2.060…P2.062),
this means the desired ratio must be normalized - because we can only
represent DI.GNUM0/1 as Follower Counts value, but the Master Counts
represents your ratio. Normalizing is done by changing the Drive Ratio
(shown in Figure 79
as 1677.72).

 Loading...
Loading...









