Rockwell Automation Publication 2198-UM004D-EN-P - December 2022 209
Chapter 9 Tuning
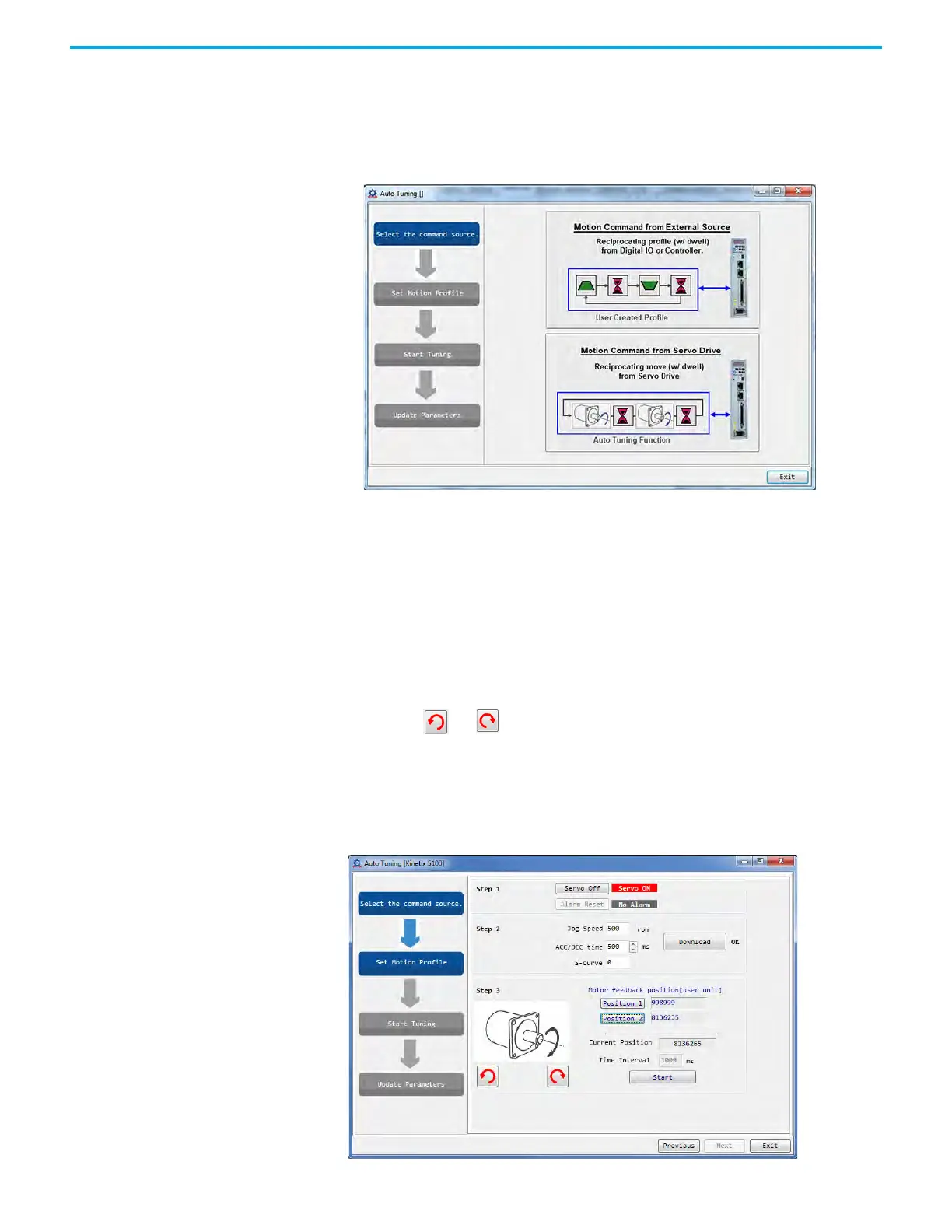
Motion Command From Servo Drive
Follow these steps to have the drive plan the path and issue the command to
move the motor.
1. Select Drive: Motion Command From Servo Drive.
2. Complete the following steps to set the running path of the motor.
a. Set the system to Servo ON state.
b. Set the acceleration/deceleration time and jog speed.
The default setting of acceleration/deceleration time is 500 ms.
Set the jog speed to no less than 500 rpm. Set these values similarly to
your application requirements.
c. Click Download.
d. When the motor dynamics are set (Step 2 of the Autotuning dialog
box), click Position 1 to register a start position for the bi-directional
autotune index.
e. Use or to jog the motor away from Position 1 and to generate
Position 2. When you have chosen a location for Position 2, click
Position 2.
f. Then, click Start to move the motor between the two positions. The
motor uses bi-directional movements between Position 1 and Position
2.
g. Click Next.

 Loading...
Loading...









