Rockwell Automation Publication 2198-UM004D-EN-P - December 2022 239
Chapter 10 Modes of Operation
• UY: Filter Width Setting
As the pulse frequency increases, the pulse width becomes smaller. When the
pulse width becomes smaller than the filter width setting, those pulses are
filtered out as noise. Thus, the filter width must be set smaller than the actual
pulse width. Set the filter width to be four times smaller than the actual pulse
width.
For example:
Y Setting Value
U = 0
Unit: µs (kHz)
U = 1
Unit: µs (kHz)
0 No filter function No filter function
1 2 (250) 0.2 (2500)
2 3 (166) 0.3 (1666)
3 4 (125) 0.4 (1250)
4 5 (100) 0.5 (1000)
5 6 (83) 0.6 (833)
67 (71)0.7 (714)
7 8 (62) 0.8 (625)
8 9 (55) 0.9 (555)
9 10 (50) 1 (500)
A 11 (45) 1.1 (454)
B 12 (41) 1.2 (416)
C 13 (38) 1.3 (384)
D 14 (35 1.4 (357)
E 15 (33) 1.5 (333)
If Then
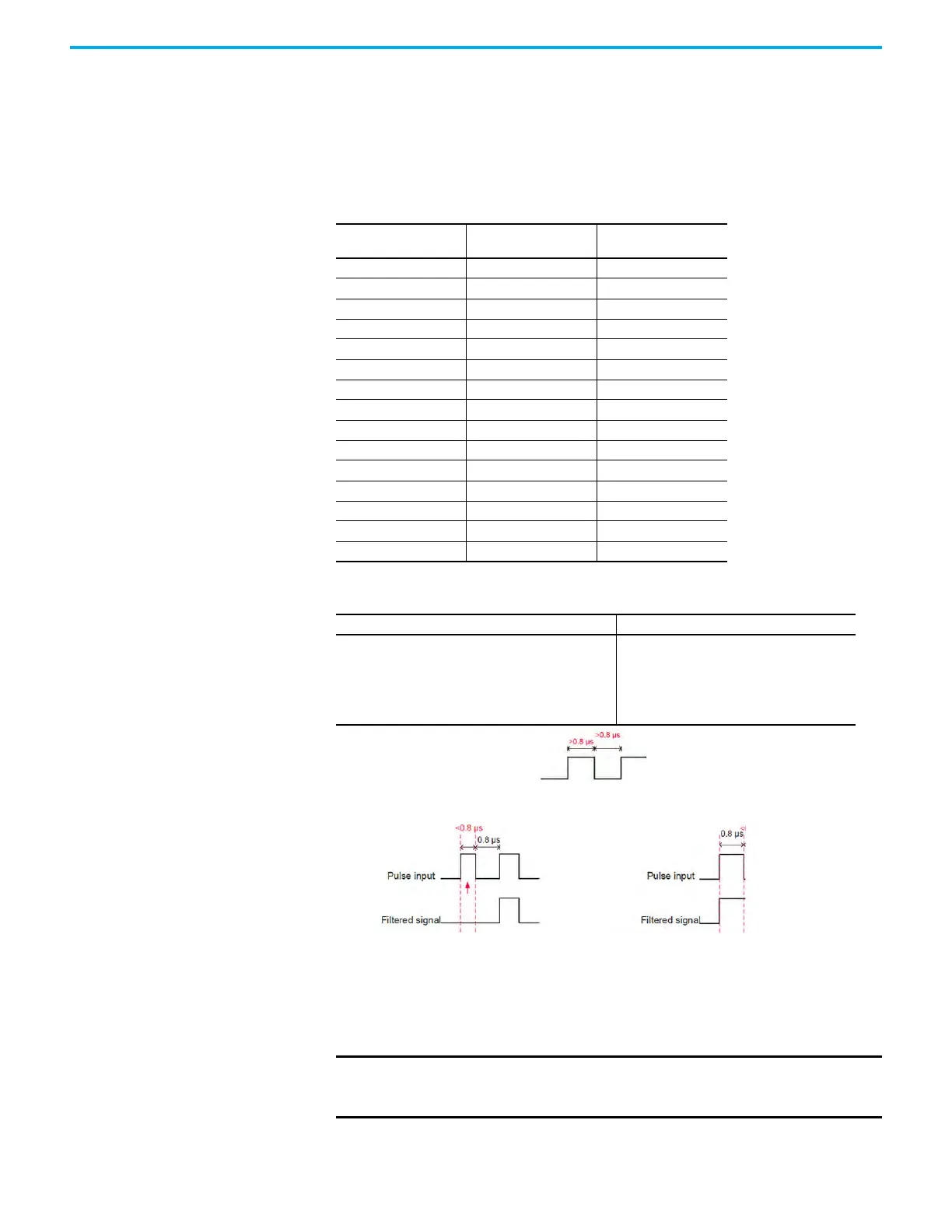
U is set to 1 and Y is set to 1 (filter width is 0.2 µs
[2500 kHz])
and
The high and low duty width of the command pulse are
both larger than 0.8 µs (625 kHz) (filter width is four times
of 0.2 µs [2500 kHz])
The pulse command is not filtered out.
When the high or low duty width of the pulse is smaller than the filter width, then the pulse command is
filtered out.
If this first pulse width is shorter than 0.8 µs (625 kHz), it
can be filtered, and thus two input pulses are regarded as
one pulse. If this pulse width is shorter than 0.2 µs (2500
kHz), it is filtered.
If this low level pulse width is shorter than 0.8 µs
(625 kHz), it can be filtered, and thus two input
pulses are regarded as one pulse. If this low level
pulse width is shorter than 0.2 µs (2500 kHz), it is
filtered.
If 125 ns (4 MHz) input pulse is used, set the filter setting value Y to 0 as no filter function.
IMPORTANT
When the signal is the high-speed pulse specification of 125 ns
(4 MHz) and the setting value of the filter is 0, then the pulse is not
filtered.

 Loading...
Loading...









