Rockwell Automation Publication 2198-UM004D-EN-P - December 2022 275
Chapter 10 Modes of Operation
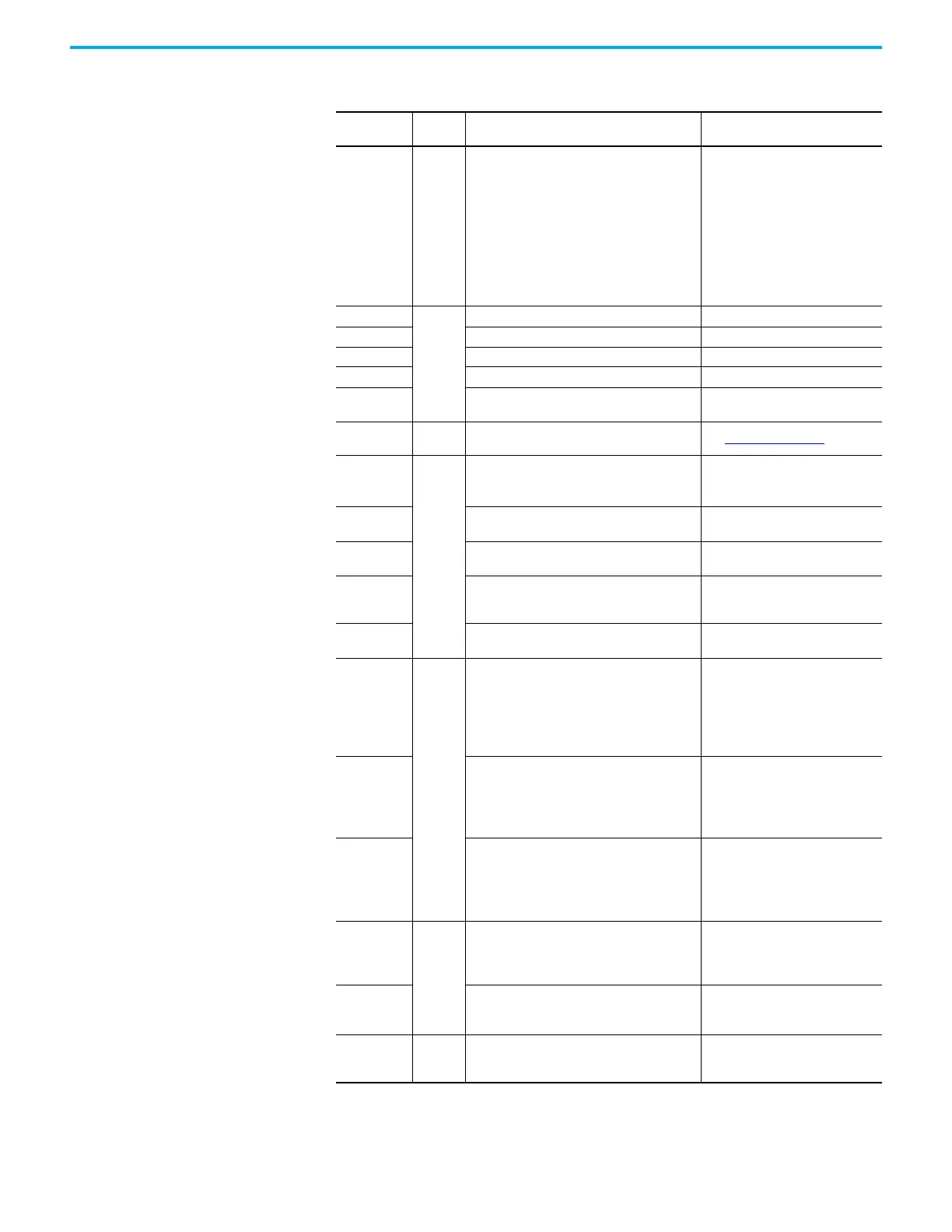
Table 104 - Kinetix 5100 Drive Output Assembly Data Description
Name
Data
Type
Description Semantics of Values
Operating
mode (output)
SINT
This enumerated value indicates the drive's
internal mode setting. The drive can operate in
different sub-modes while in IO Mode.
• -128…-1: Reserved
• 0: Mode not specified
•1: Position mode
• 2: Speed mode
• 3: Home mode
•4: Torque mode
•5: Gear mode
• 6: Index mode
•7: ECAM mode
•8…127: Reserved
Servo on
BOOL
A 0-to-1 transition enables the motor. —
Servo off A 0-to-1 transition disables the motor. —
Stop motion A 0-to-1 transition stops motion on the motor. —
Fault reset A 0-to-1 transition clears an active drive fault. —
Start motion
A 0-to-1 transition means the motion command
is issued from the external controller.
—
Homing
method
SINT Homing method. See Table 112 on page 301
.
Speed
reference
DINT
The commanded speed for the motor.
• Units are 0.1 RPM
• -80000…+80000
• 1…20000 (home mode)
Acceleration
reference
The commanded acceleration rate for the
motor.
Units are 0.1 RPM/sec
Deceleration
reference
The commanded deceleration rate for the
motor.
Units are 0.1 RPM/sec
Position
reference
The commanded position used for indexing.
User units as defined by the scaling
relationship from the E-Gear ratio in
KNX5100C software.
Home return
speed
The return speed when home mode is the
operating mode.
1…5000 units are 0.1 RPM (rotary
motors)
Non-cyclic
move type
SINT
Enumerated value used to determine the
noncyclic move type.
• -128…-1: Reserved
•0: Absolute
•1: Relative
• 2: Incremental
• 3: High-speed capture
•4…127: Reserved
Cyclic move
type
Enumerated value used to determine the cyclic
move type.
• -128…-1: Reserved
• 0: Rotary positive
• 1: Rotary negative
• 2: Rotary shortest path
•3…127: Reserved
Travel mode
Enumerated value used to determine the travel
constraints of the axis.
• -128…+1: Reserved
•2: Non-cyclic move
•3…9: Reserved
• 10: Cyclic move
• 11…127: Reserved
Position
command
override
BOOL
When executing a motion command, the next
movement can override the previous movement.
• 0: Does not override previous
movement
• 1: Can override previous
movement
Position
command
overlap
The end of the current movement can be
overlapped by the next movement.
• 0: Does not overlap the next
movement
• 1: Overlaps the next movement
Captured
position select
BOOL
Selects between the high speed digital inputs
used to capture position feedback.
Vendor specific.
0: DI9 is selected
1: DI10 is selected

 Loading...
Loading...









