276 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 10 Modes of Operation
Torque
reference
DINT
Represents the output torque lev
el when the
Operation Mode is Torque Mode (3). This value is
percent of motor rated torque.
-4000…4000 enumeration is 0.1x
Torque ramp
time
Represents the time to reach the torque
reference. This units are ms.
1…65500
Starting index SINT
The first index (position register) that the drive
should execute.
• -128…-1: Reserved
•0: PR 0
• 1…99: PR1…PR99
•100…127: Vendor specific
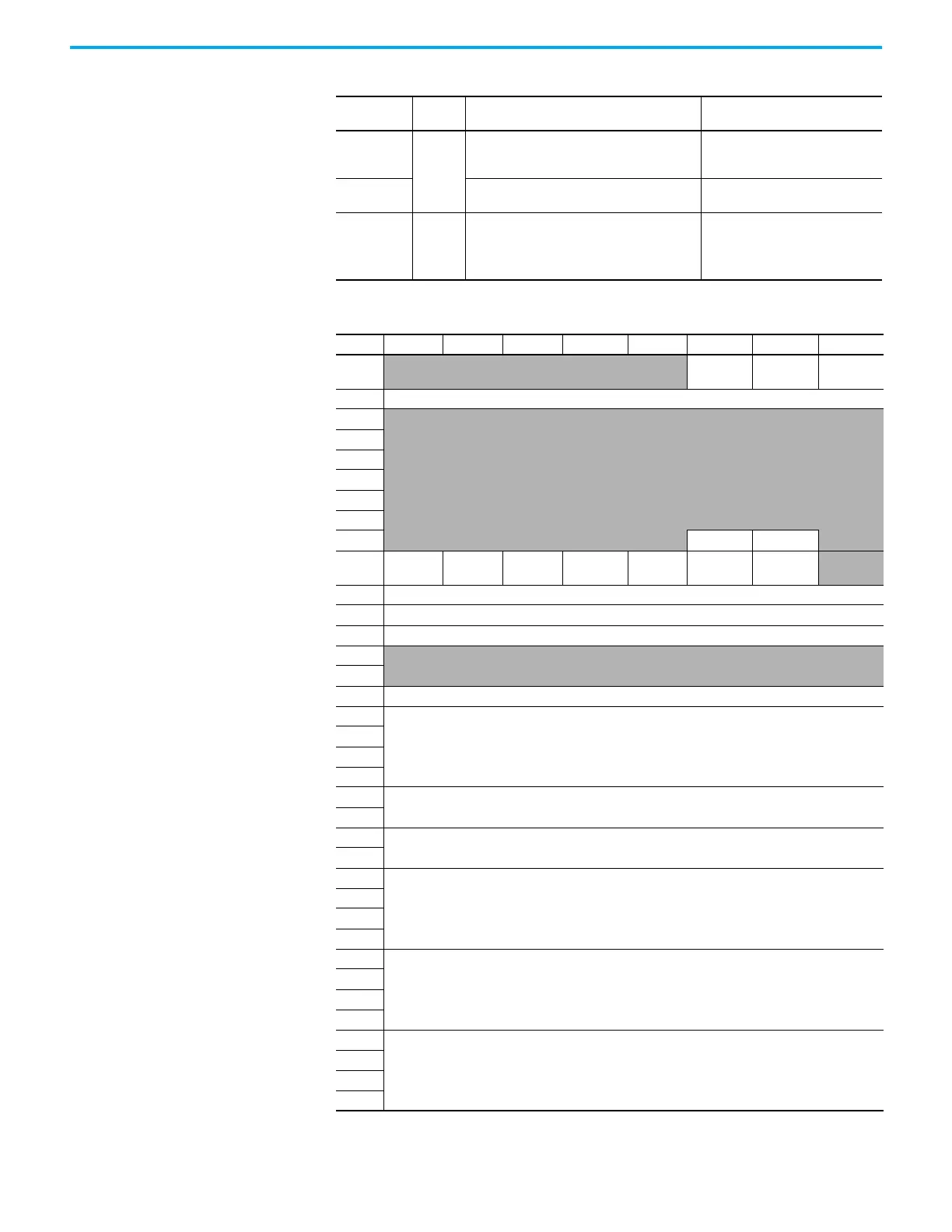
Table 105 - Kinetix 5100 Input Assembly Data (Instance 154)
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0
Diagnostic
Active
Connection
Faulted
Run Mode
1 Diagnostic sequence count
2
Pad bytes for LINT alignment
3
4
5
6
7
8 Uncertain Fault
9
At
Reference
Stopped
Homed
Status
Command in
Progress
Ready Active
Warning
Present
10 Reserved
11 Operating Mode
12 Active Index
13
Reserved
14
15 Motor Type
16
Actual Speed (DINT)
17
18
19
20
Fault Code (UINT)
21
22
Warning Code (UINT)
23
24
Actual Position (DINT)
25
26
27
28
Actual Torque (DINT)
29
30
31
32
Parameter Monitor 1 Value (DINT)
33
34
35
Table 104 - Kinetix 5100 Drive Output Assembly Data Description (Continued)
Name
Data
Type
Description Semantics of Values

 Loading...
Loading...









