302 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 11 Motion Control in PR Mode
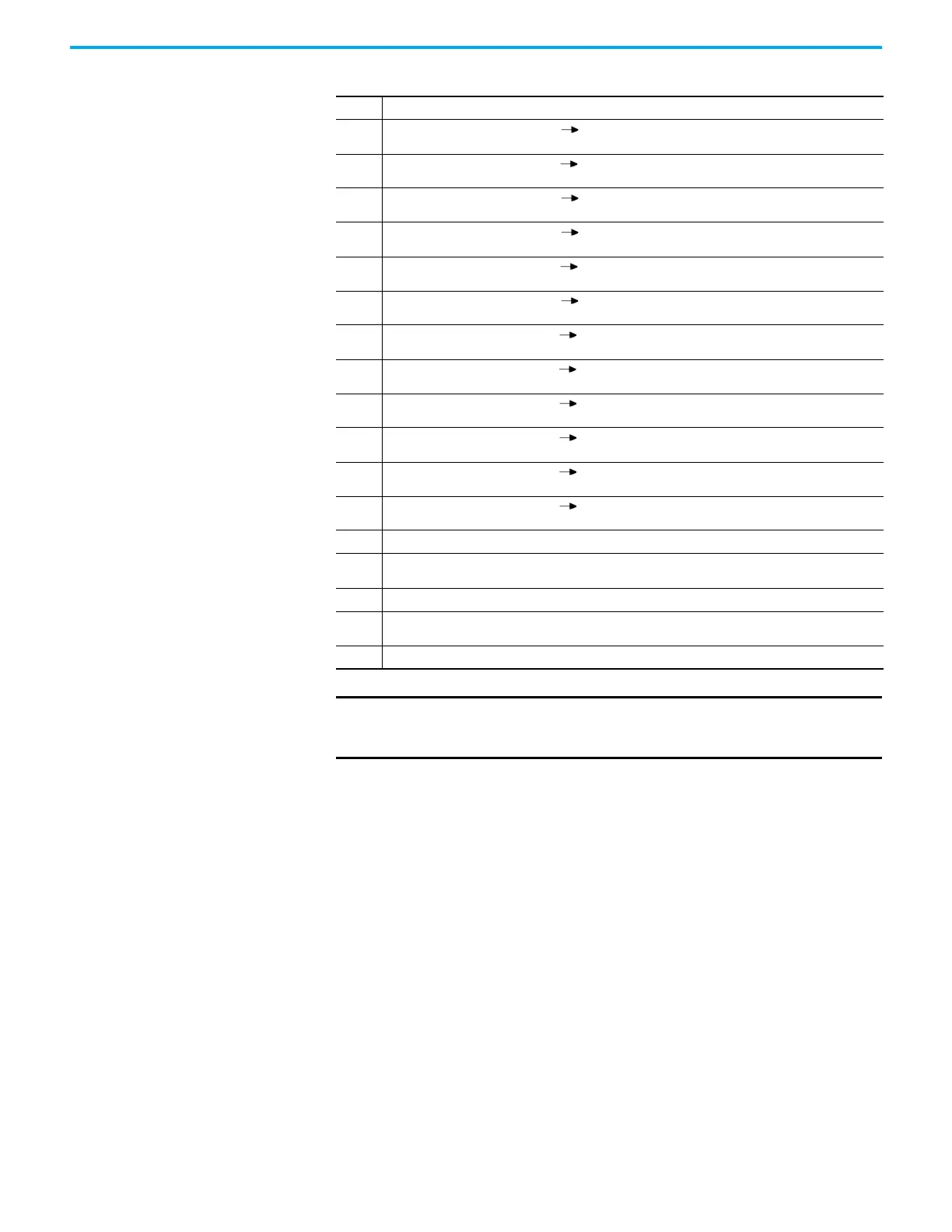
22
Homing in for
ward direction, ORG: ON OFF as homing origin. Return to Z pulse. Shows error when
encounter limit.
23
Homing in forward direction, ORG: ON OFF as homing origin. Return to Z pulse. Reverse direction when
encounter limit.
24
Homing in forward direction, ORG: ON OFF as homing origin. Go forward to Z pulse. Shows error when
encounter limit.
25
Homing in forward direction, ORG: ON OFF as homing origin. Go forward to Z pulse. Reverse direction
when encounter limit.
26
Homing in forward direction, ORG: ON OFF as homing origin. Do not look for Z pulse. Shows error when
encounter limit.
27
Homing in forward direction, ORG: ON OFF as homing origin. Do not look for Z pulse. Reverse direction
when encounter limit.
28
Homing in reverse direction, ORG: ON OFF as homing origin. Return to Z pulse. Shows error when
encounter limit.
29
Homing in reverse direction, ORG: ON OFF as homing origin. Return to Z pulse. Reverse direction when
encounter limit.
30
Homing in reverse direction, ORG: ON OFF as homing origin. Go forward to Z pulse. Shows error when
encounter limit.
31
Homing in reverse direction, ORG: ON OFF as homing origin. Go forward to Z pulse. Reverse direction
when encounter limit.
32
Homing in reverse direction, ORG: ON OFF as homing origin. Do not look for Z pulse. Shows error when
encounter limit.
33
Homing in reverse direction, ORG: ON OFF as homing origin. Do not look for Z pulse. Reverse direction
when encounter limit.
34 Define current position as the origin.
35
Look for the collision point in forward direction and regard it as the origin. Return to Z pulse. Shows error
when encounter negative limit.
36 Look for the collision point in forward direction and regard it as the origin. Do not look for Z pulse.
37
Look for the collision point in reverse direction and regard it as the origin. Return to Z pulse. Shows error
when encounter positive limit.
38 Look for the collision point in reverse direction and regard it as the origin. Do not look for Z pulse.
IMPORTANT
The Homing Method values shown are for the IO Operation mode. The
homing operations are the same as in PR Mode, however, the Homing
Method values are different.
Table 112 - Homing Method Values - IO Mode (Continued)
Value Description

 Loading...
Loading...









