Rockwell Automation Publication 2198-UM004D-EN-P - December 2022 303
Chapter 11 Motion Control in PR Mode
Homing to Positive Limit
This homing method uses the positive or negative limit (the limit is also called
a travel or overtravel), see Figure 109
through Figure 111 for examples. When
the limit is detected, you can choose to look for the marker pulse (Z) and set the
Home Position when the marker pulse is detected. If no marker pulse is used,
the Home Position is set when the limit is detected. Changing the starting
position does not change the homing operation.
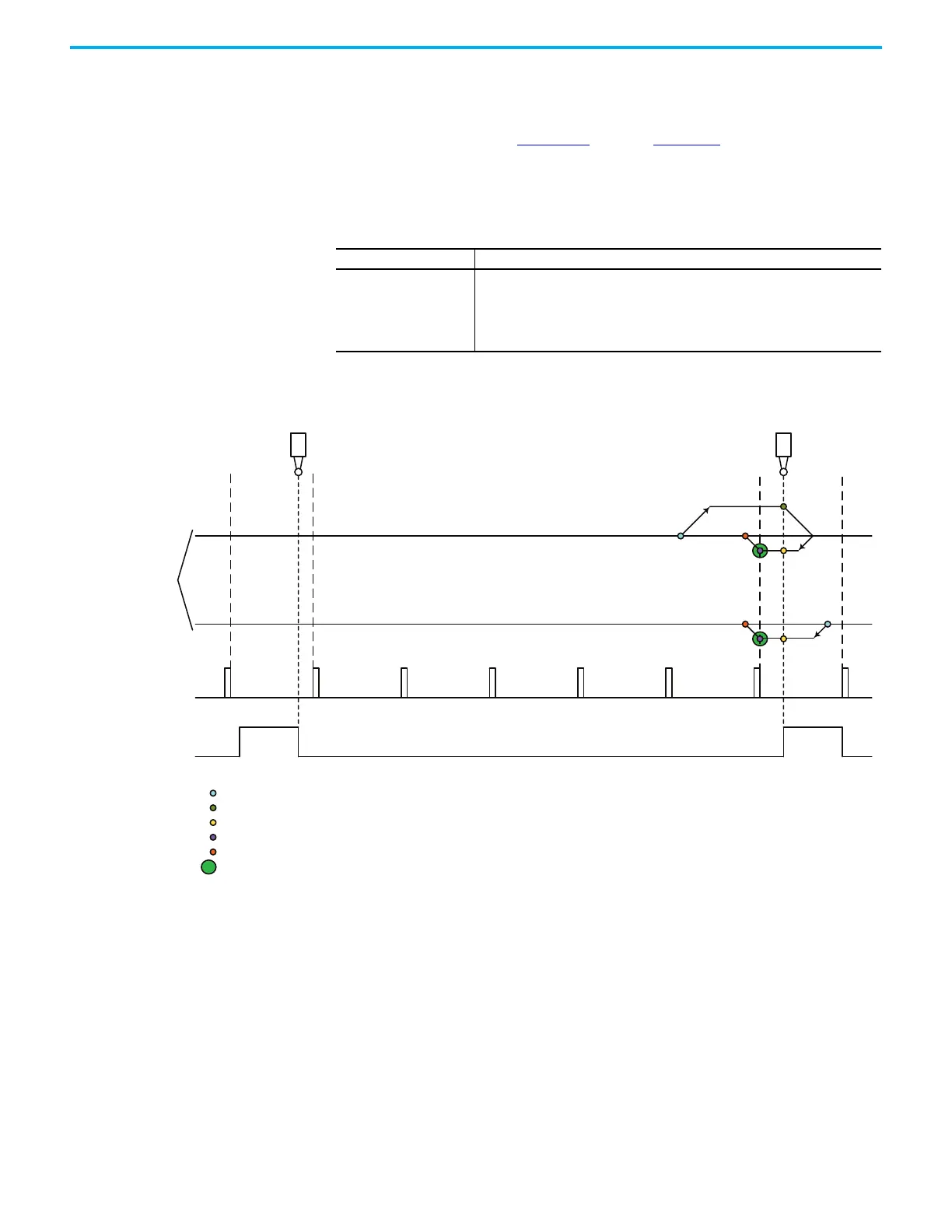
Figure 109 - Homing to Positive Limit - Homing Method 0
Homing Method - IO Mode Homing Method - Description
0
Homing in forward direction and regard PL as homing origin, Return to Z pulse.
• Return is called 'Move backward' in KNX5100C software
• High Speed Homing (HS) (1st speed setting) is /10 - so 1000 = 100 rpm
• Low Speed (LS) Homing (2nd speed setting) is /10 - so 200 = 20 rpm
• Home Position is set at Green dot
Negative Limit (NL)
Positive Limit (PL)
Homing Method: 0
Start Point 1
Start Point 2
Limit Signal
Z-Pulse
Start Point
Positive Limit OFF to ON
Positive Limit ON to OFF
Z-Pulse ON
End Point
Home Position Set
HS = High Speed (1st Speed)
LS = Low Speed (2nd Speed)

 Loading...
Loading...









