322 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 11 Motion Control in PR Mode
Referencing the Present Position as the Origin
This homing method sets the present physical location of the motor as the
HomePosition ID 397 (P6.001). The motor does not move using this homing
method and the motor must be enabled. When the Operation Mode is IO, this
method is used with the raC_xxx_K5100_MAH and is Homing Method 34.
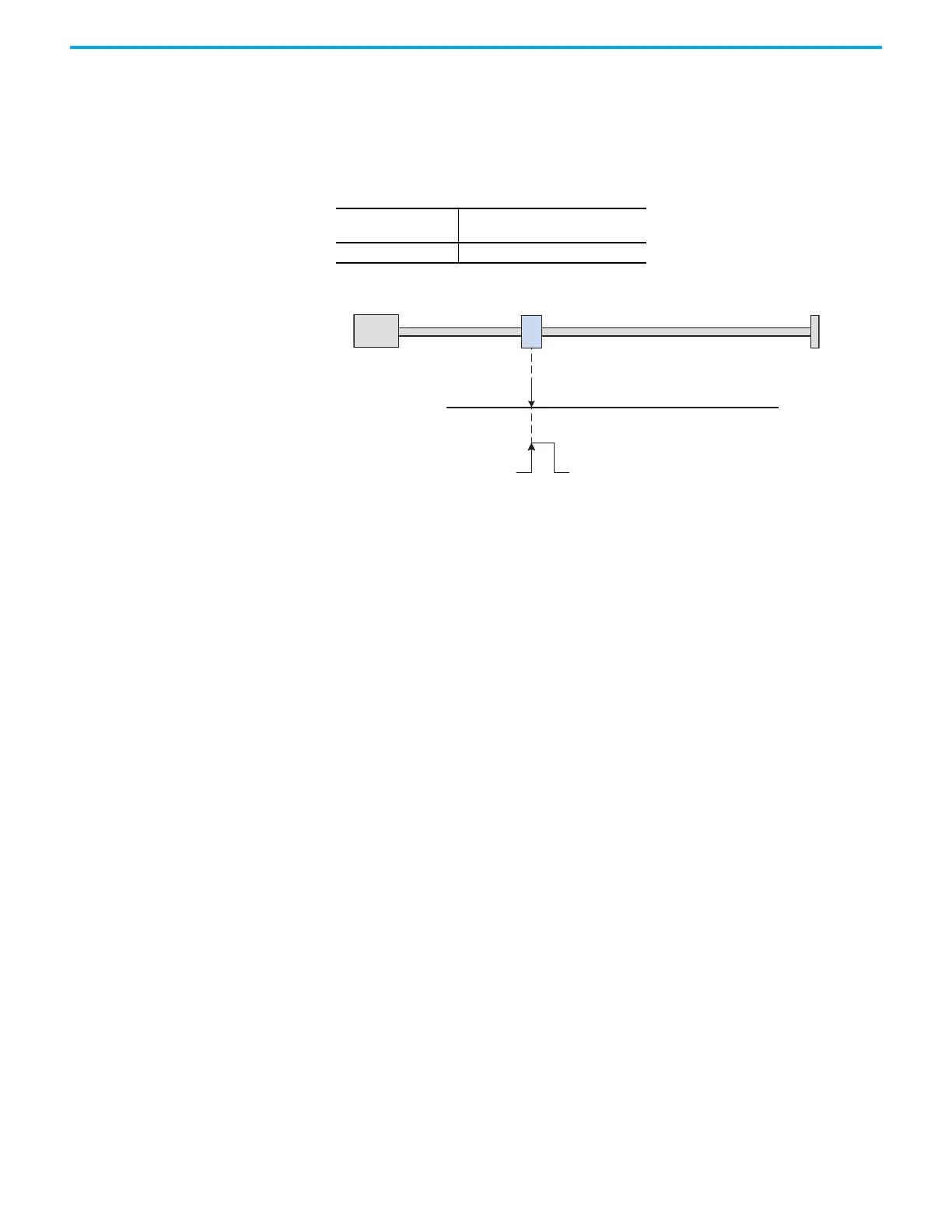
Figure 128 - Referencing Current Position as the Origin
The Digital Input (DI.Enable Homing) must be used to perform this homing.
Referencing the Torque Limit
This homing method references a user defined motor torque parameter
HomingTorqueCollisionTorqueLimit ID177 (P1.087) as a 'hard stop'. When the
motor is homing and the actual motor torque equals the
HomingTorqueCollisionTorqueLimit; and this condition is true for the
HomingCollisionTorqueLimitTime ID178 (P1.088), the optional marker
homing is executed and the homing is complete.
Be sure that the torque used for this homing method is within any user defined
torque limit or the homing does not complete.
Homing Method - IO
Mode
Homing Method - Description
34 Define current position as the origin.
Motor
End
DI.SHOM [0x27] Return to Homing Origin

 Loading...
Loading...









