Rockwell Automation Publication 2198-UM004D-EN-P - December 2022 323
Chapter 11 Motion Control in PR Mode
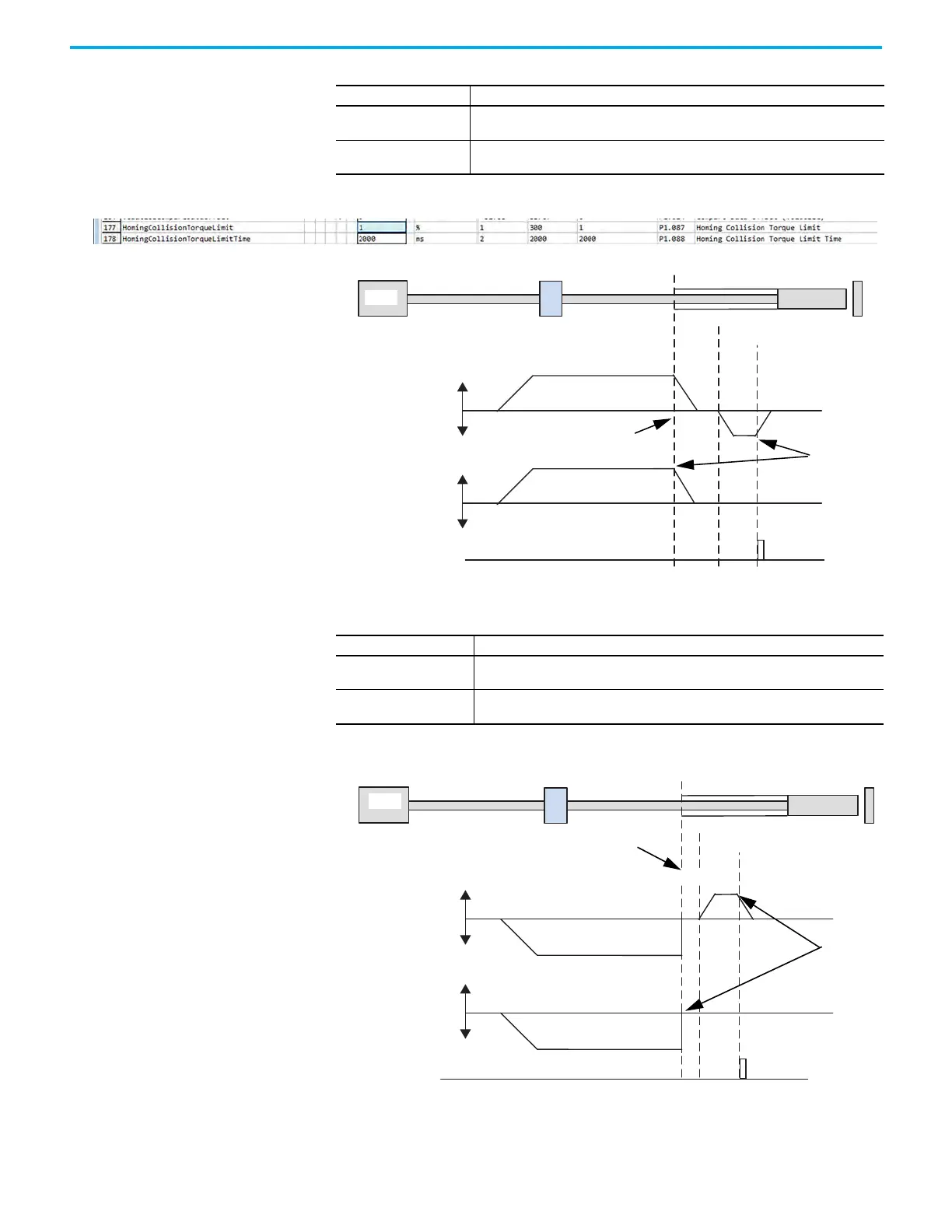
Figure 129 - Torque Limit as Reference Point - Forward Direction
Figure 130 - Torque Limit as Reference Point - Reverse Direction
Homing Method - IO Mode Homing Method - Description
35
Look for the collision point in forward direction and regard it as the origin. Return to Z
pulse.
36
Look for the collision point in forward direction and regard it as the origin. Do not look
for Z pulse.
Homing Method - IO Mode Homing Method - Description
37
Look for the collision point in reverse direction and regard it as the origin. Return to Z
pulse.
38
Look for the collision point in reverse direction and regard it as the origin. Do not look
for Z pulse.
Homing Method: 35
Homing Method: 36
Start point
Home
Position
Set
End
HS
LS
Start point
HS
End
HS = High Speed (1st Speed)
LS = Low Speed (2nd Speed)
V = Velocity
t = Time
{
HomingCollisionTorqueLimitTime ID178m
ID178
(P1.088)
HomingTorqueCollisionTorqueLimit ID177
Protector (hard stop)
Axis (Load)
Motor
Homing Method: 37
Homing Method: 38
Start point
Home
Position
Set
End
HS
LS
Start point
HS
End
HS = High Speed (1st Speed)
LS = Low Speed (2nd Speed)
V = Velocity
t = Time
{
HomingCollisionTorqueLimitTime ID178m
Protector (hard stop)
Axis (Load)
Motor

 Loading...
Loading...









