Rockwell Automation Publication 2198-UM004D-EN-P - December 2022 355
Chapter 11 Motion Control in PR Mode
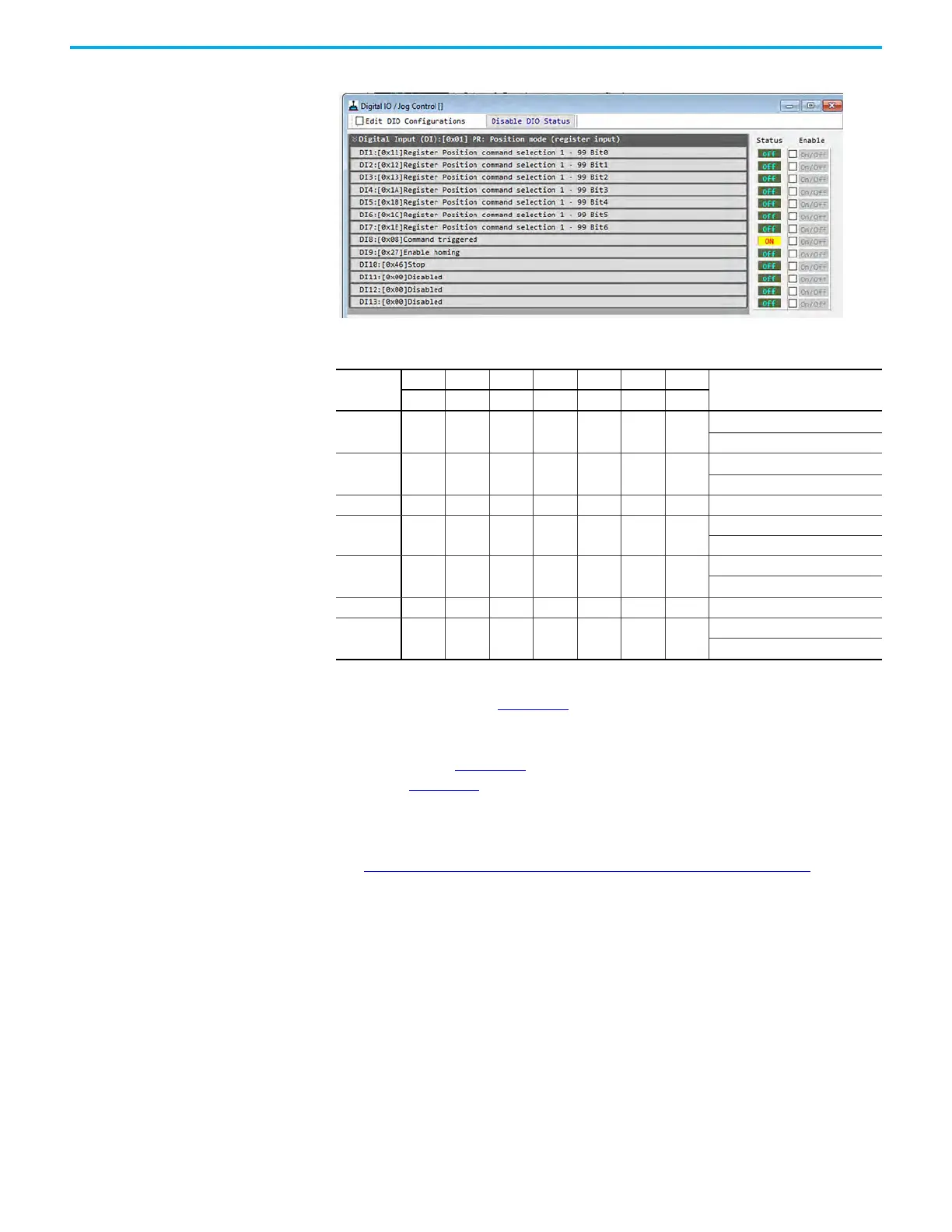
Figure 164 - I/O Setting Screen
Once the DI combination is set, toggle DI - Command Triggered to execute the
PR selection (shown in Figure 164
).
In addition, there are two sets of DI for special functions, DI. Enable homing
[0x27] (shown in Figure 164
) return to homing origin and DI. Stop [0x46]
(shown in Figure 164
), used to stop the motor. When DI Enable Homing is
triggered, the homing operation executes. When Stop is executed, any
currently executing PR and motor movement is stopped.
See Digital I/O and Jog Function in KNX5100C Software
on page 184 for more
information on configuring the Digital I/O.
Table 116 - Use DI to Generate the Binary Weighted PR Command to be Triggered
Position
Command
DI DI DI DI DI DI DI
Parameter
654321 0
Homing 0000000
HomeSetting ID397 (P6.000
HomePosition ID398 (P6.001)
PR#1 0000001
PRCmd1Setting ID399 (P6.002)
PRCmdData ID400 (P6.003)
…
PR#49 01 1 0001
PRCmd49Setting ID495 (P6.098)
PRCmd49Data ID496 (P6.099)
PR#50 0110010
PRCmd50Setting ID497 (P7.000)
PRCmd50Data ID498 (P7.001)
…
PR#99 1100011
PRCmd99Setting ID595 (P7.098)
PRCmd99Data ID596 (P7.099)

 Loading...
Loading...









