Rockwell Automation Publication 2198-UM004D-EN-P - December 2022 361
Chapter 11 Motion Control in PR Mode
Consecutive Speed Commands
When the PR executor receives two speed commands consecutively, and they
are not set with interrupt or overlap functions, the PR executor sends this lead
PR command to the motion command generator. The generator creates the
cycle profile for this speed command. When this lead PR command completes
(either by delay or interrupt), the second PR speed command is sent to the
motion command generator and the cycle profile is created using the second
command (which now becomes the lead PR).
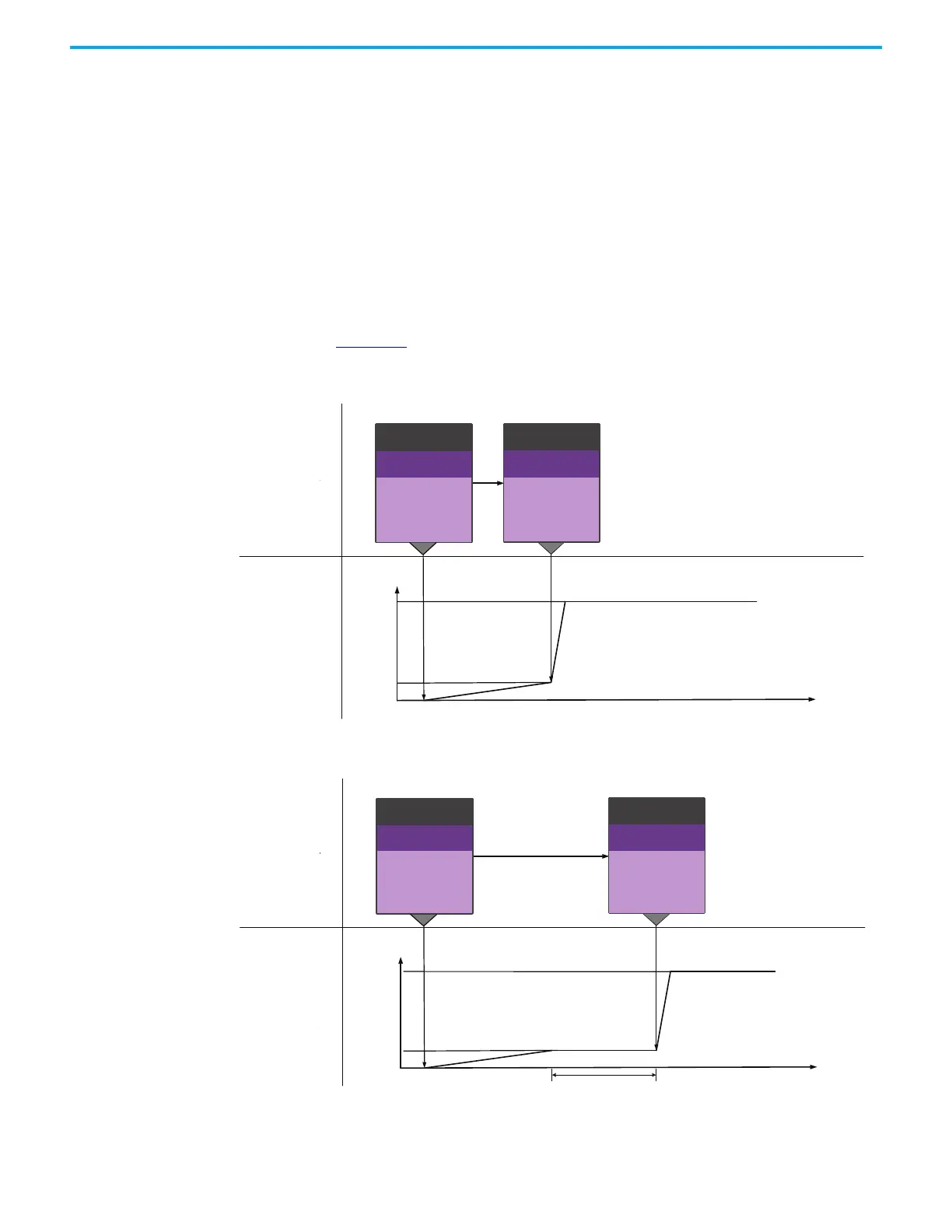
If the first speed command is used with a DLY (Delay Time), the DLY begins
timing once the motor reaches the target speed. When the DLY expires, the
second speed command is executed as described earlier and shown in
Figure 169
.
Figure 169 - Speed Command
Command with Delay
Command without Delay
PR
executor
Motion
command
generator
Time
Speed (rpm)
PR#1
Speed
DLY=[0] 0 ms
100 rpm
Acc=[11] 100 ms
Dec=[11] 100 ms
PR#2
Speed
DLY=[0] 0 ms
500 rpm
Acc=[0] 33.3 ms
Dec=[0] 33.3 ms
100
500
(1 ms command cycle)(1 ms command cycle)
PR
executor
Motion
command
generator
Time
PR#1
Speed
DLY=[1] 100 ms
100 rpm
Acc=[11] 100 ms
Dec=[11] 100 ms
PR#2
Speed
DLY=[0] 0 ms
500 rpm
Acc=[0] 33.3 ms
Dec=[0] 33.3 ms
100ms
Speed (rpm)
100
500
(1 ms command cycle)(1 ms command cycle)
Motion
command
generator
PR
executor
PR
executor
Motion
command
generator
Command with Delay
Command without Delay

 Loading...
Loading...









