362 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 11 Motion Control in PR Mode
Multiple Commands
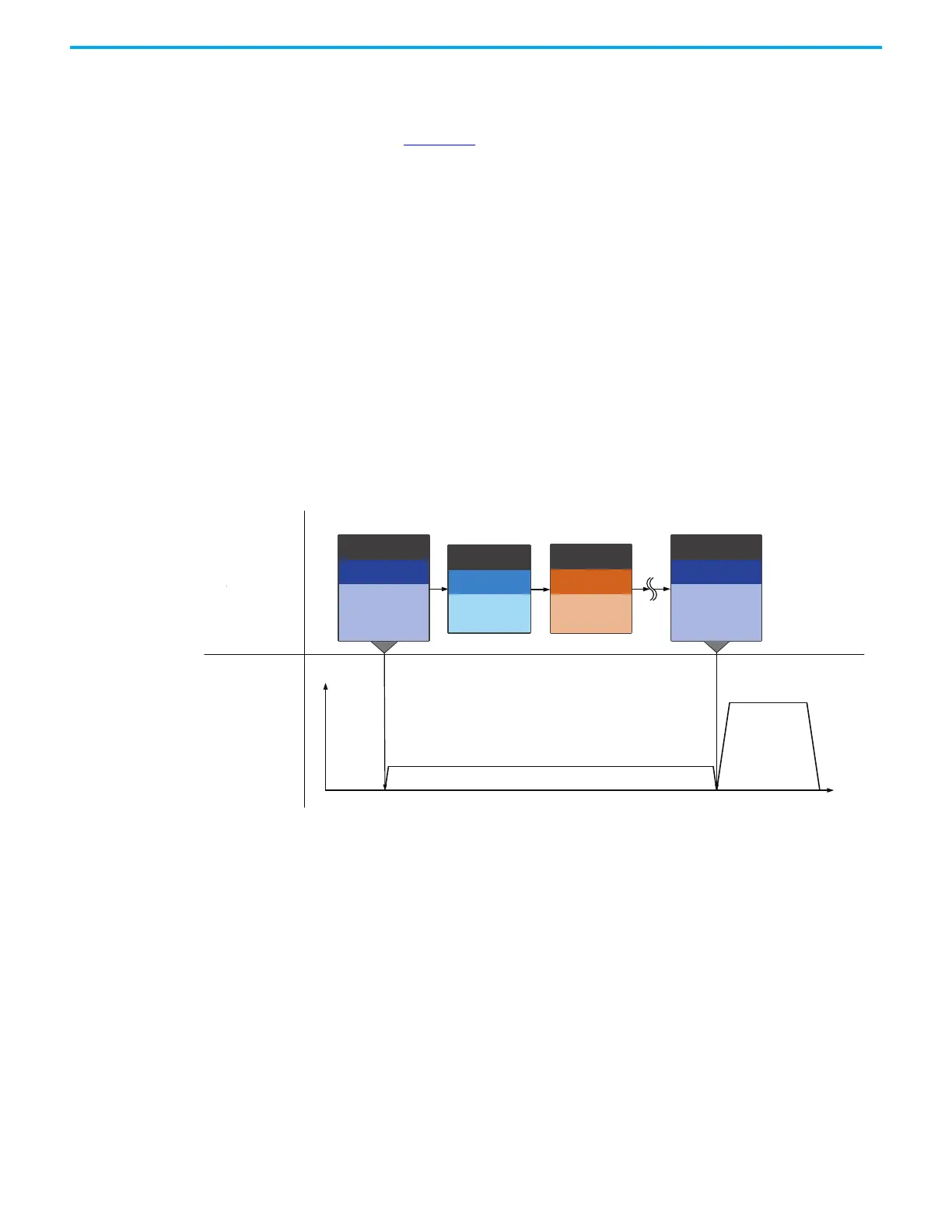
This section shows how multiple commands are processed by the drive, as
shown in Figure 170
.
In the first ms, after a command is triggered, the PR queue sends a position
command to the PR executor. The PR executor receives a position command
and sends this command to the motion command generator, then the cycle
profile is generated.
In the second ms, the PR executor receives a write command and executes it
immediately.
In the third ms, the PR executor receives a jump command and executes it
right away. These two commands are not sent to the motion command
generator; the PR executor and the motion command generator can execute
commands independently.
In the fourth ms, the PR executor receives a position command.
Figure 170 - Sequence Command - Multiple Commands
PR#1
Position
DLY=[0] 0 ms
5000 PUU
ABS
200 rpm
PR#5
Position
DLY=[0] 0 ms
10000 PUU
ABS
500 rpm
PR
executor
Motion
command
generator
Time
Speed
PR#2
Write
DLY=[0] 0 ms
P5.045=100
PR#3
Jump
DLY=[0] 0 ms
PR#5
(1 ms command cycle)
(1 ms command
cycle)
(1 ms command
cycle)
(1 ms command cycle)
Motion
command
generator
PR
executor

 Loading...
Loading...









