394 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 12 Motion Control Applications
You can choose the disengagement condition based on your requirements by
setting ECamControl ID376 (P5.088). The Kinetix 5100 drive provides five
disengagement timing conditions:
• Continuous (ID376 (P5.088.U) = 0 — The clutch does not disengage until
the E-CAM function is disabled.
• Disengagement using Digital Input E-CAM engaging control
(ID376 (P5.088.U) = 1) — The clutch is disengaged when the digital input
(DI:E-CAM engaging control [0x036]) transitions off. It remains
disengaged when this DI is OFF.
• Disengagement once ID376 (P5.088.U) = 2 — The clutch is disengaged
and stops immediately when the number of master pulses reaches the
value in ID377 (P5.089), which is shown in Figure 204
. This
disengagement condition is suitable for applications where the slave axis
must be accurately stopped.
Figure 204 - Immediate Stop After Disengagement
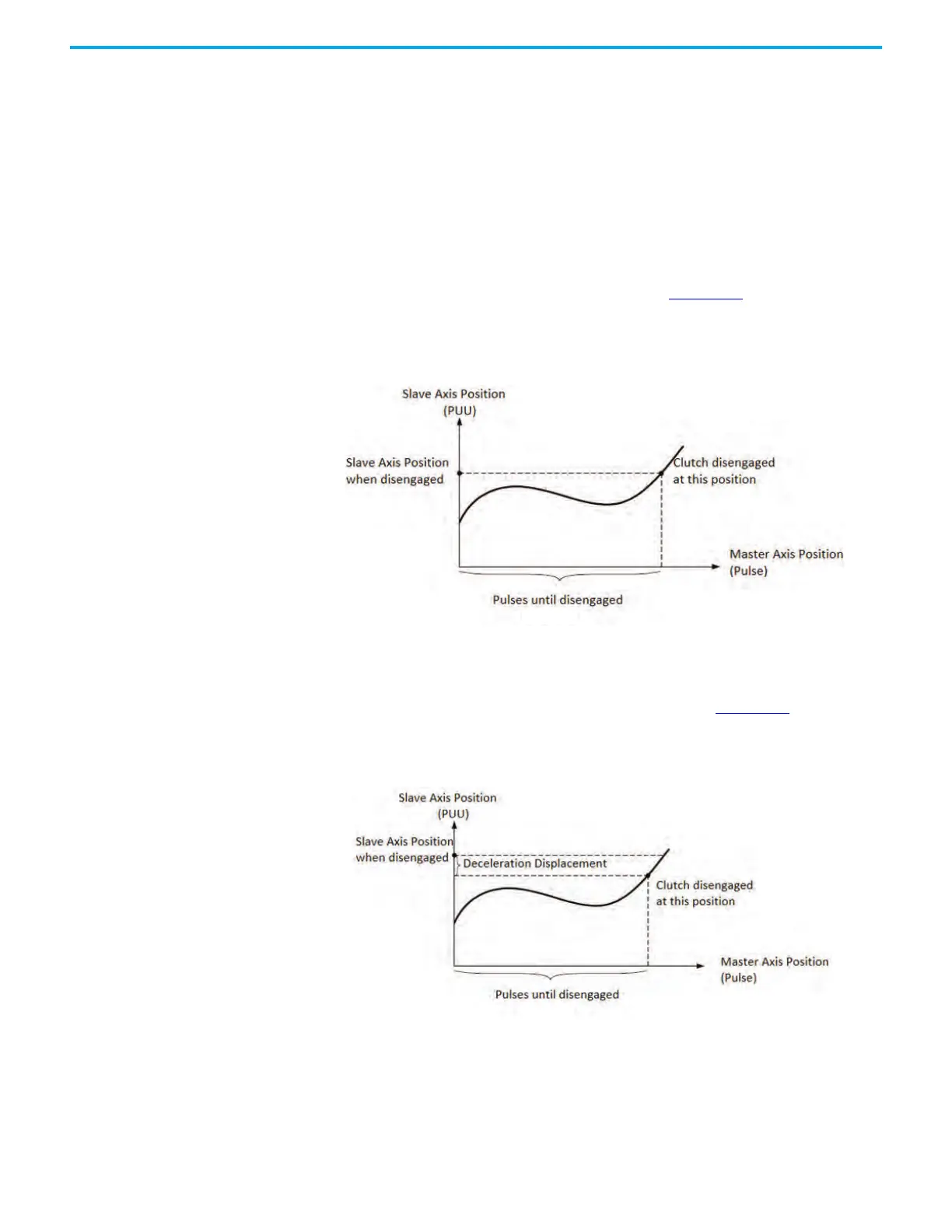
• Deceleration stop after disengagement (ID376 (P5.088.U) = 6) — The
clutch is disengaged and decelerates smoothly to stop when the number
of pulses of master axis reached the value set by ID377 (P5.089). Then the
E-CAM system enters the stop state, as shown in Figure 205
. This
disengagement condition is suitable for the application where the slave
axis must be slowly decelerated to a stop.
Figure 205 - Deceleration Stop After Disengagement
ID377 (P5.089)

 Loading...
Loading...









