438 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 15 Programming via Drive Parameters
0x04
Motor reaches the target speed
This DO is on whenev
er the motor reaches UpToSpeedLimit ID146 (P1.039).
Level triggered All
0x05
Motor reaches target position
This DO is on whenever the motor position is within InPositionWindow ID159 (P1.054).
Level triggered
PT, PR, I/O
(Position, Gear)
0x06
Torque Limit Activated
This DO is on whenever the drive is in a torque limited condition.
Level triggered
All (Except for T
and Tz)
0x07
Servo Alarm
This DO is on whenever an alarm or fault condition is active. This DO does not turn on when: forward or reverse
limits are active, communication error, undervoltage, and fan error.
Level triggered All
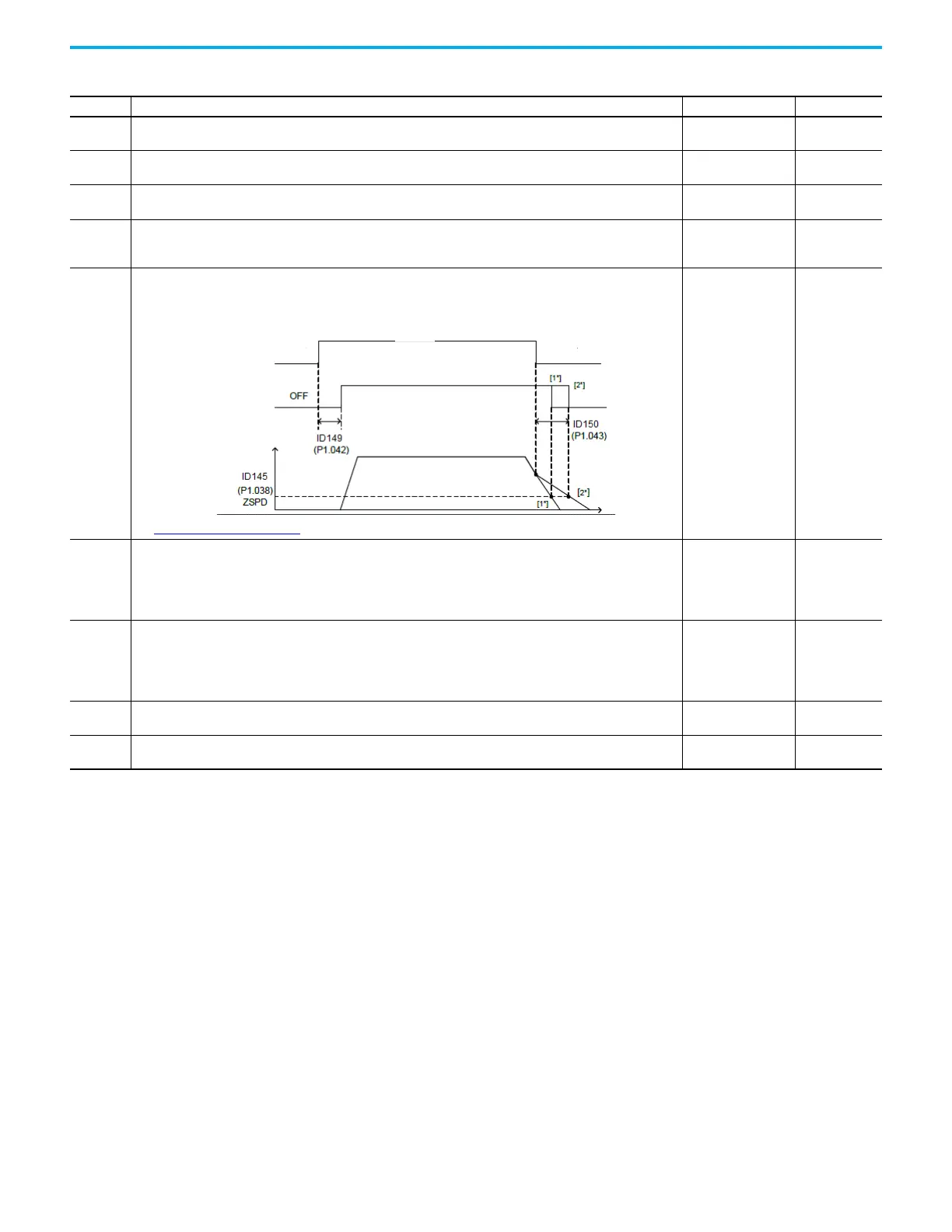
0x08
Brake Control
This DO is on whenever an alarm or fault condition is active. This DO does not turn on when: forward or reverse
limits are active, communication error, undervoltage, and fan error.
See Motor Brake Circuit
on page 68.
Level triggered All
0x09
Homing Completed
This DO is on when homing is successfully completed on the axis. When Motor Feedback>Startup Method is:
• Incremental: This DO is off when control/main power is cycled.
• Absolute: This DO is on when control/main power is cycled.
• If the position cycle counts overflow occurs, this DO is off.
Level triggered PR
0x0B
At Home Position
This DO is on when:
• Homing is complete
• The Command Position is equal to the Home Position
• The difference between Feedback Position and the Home Position is within InPositionWindow ID 159 (P1.054)
Level triggered PR
0x0D
Absolute Type System Error
This DO is on when a fault occurs while the Absolute Homing is in process.
Level triggered All
0x0E
Indexing Coordinate is defined
The indexing coordinate is defined when homing is completed. This DO is on when homing is complete.
—PR
Table 137 - Digital Outputs (Continued)
Setting DO Description Triggering Method Control Mode
OFF
OFF
Motor Speed
ON
ON
SON
M_BRK

 Loading...
Loading...









