138 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 7 Configure the Drive with KNX5100C Software
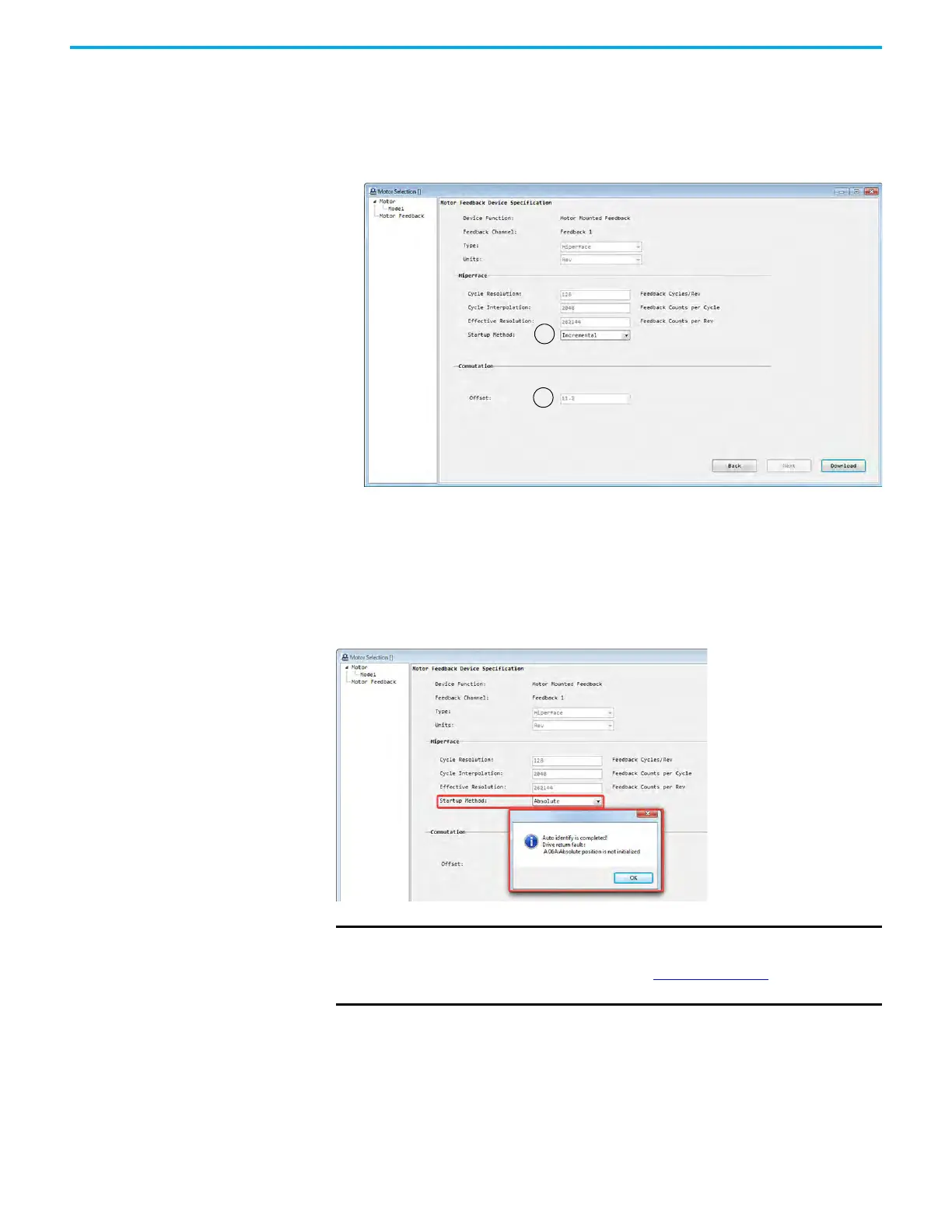
With Motor NV selected and the drive is power cycled, these other changes are
made:
• Commutation alignment is fixed as Motor offset (A in the next figure)
• The default Startup Method is set as Incremental (B in the next figure)
• The position feedback is zero
If your application requires absolute positioning, you can change the startup
method to Absolute from the pull-down menu. If you do, click Download to
initiate the change. Then AbsoluteSystemSetting parameter ID242 (P2.069) is
set to 1 and the drive automatically triggers a power cycle. Warning A 06A
(Absolute position is not initialized) occurs after the power cycle, so you must
initialize the absolute position (using a Homing Command) to clear this fault
to let the absolute operation start.
IMPORTANT If the startup method is Absolute and the TLP motor is configured, a
battery must be used to establish absolute positioning; regardless of
single or multi-turn operation. See Table 36 on page 73
for battery
specifications.

 Loading...
Loading...









