380 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 12 Motion Control Applications
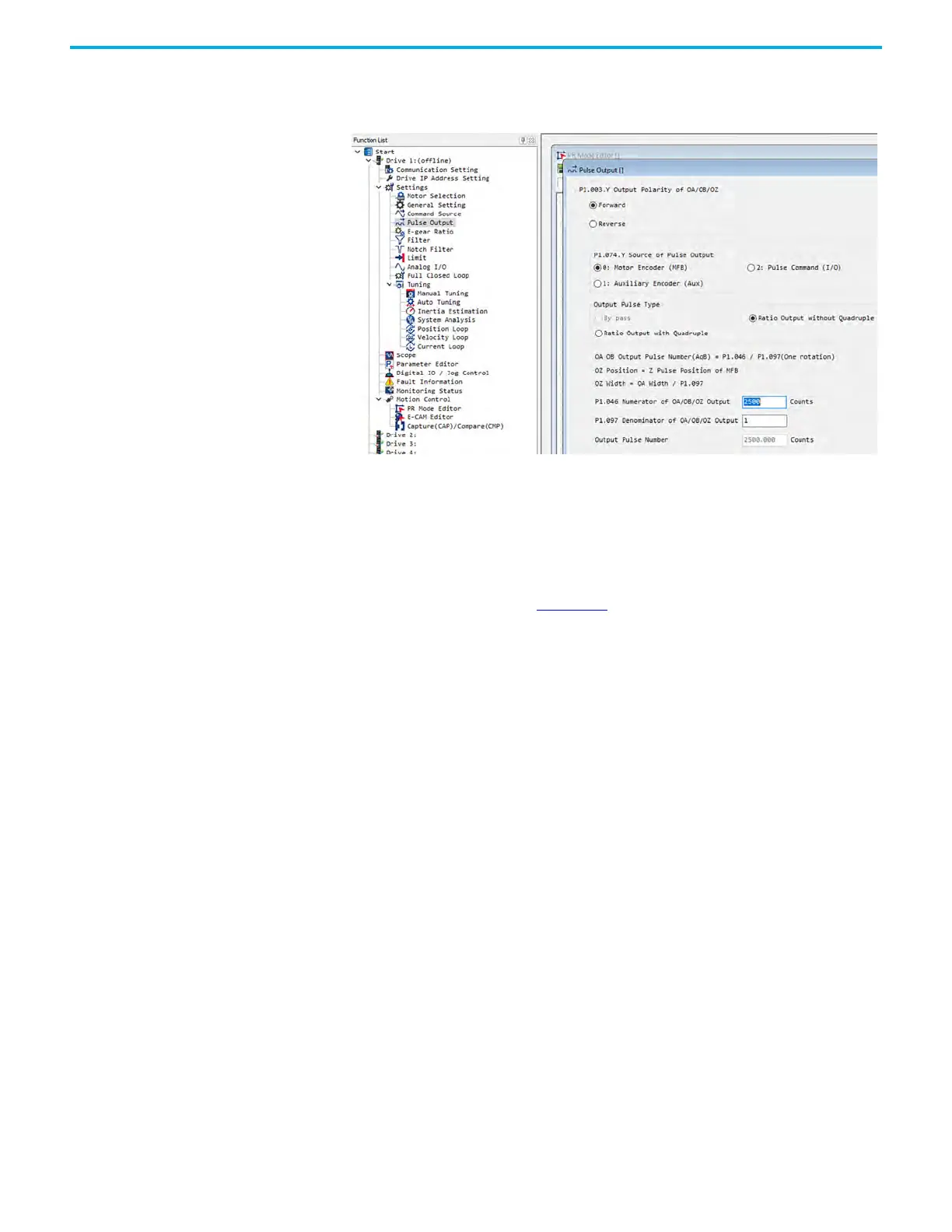
Using the Motor Encoder as the Compare Source
Figure 187 - Pulse Output
If the capturing axis is selected, the source of the capturing axis ID331
(P5.039.Y) cannot be changed. If the motor encoder is selected, the pulse
resolution is determined by EncoderOutputResolution ID153 (P1.046) and
EncoderOutputDenominator ID179 (P1.097).
When EncoderOutputDenominator ID179 (P1.097) = 0, OA/OB pulse output
(Output Pulse Number from Figure 187
) only refers to the setting of
EncoderOutputResolution ID153 (P1.046).
Example 1:
When EncoderOutputDenominator ID179 (P1.097) = 0;
EncoderOutputResolution ID153 (P1.046) = 2500
OA/OB output = EncoderOutputResolution ID153 (P1.046) uses
quadruple (4x the frequency), which is 10,000 pulses.
When EncoderOutputDenominator ID179 (P1.097) has been set (value is not 0),
OA/OB pulse output needs to be calculated via the numerator and
denominator of EncoderOutputResolution ID153 (P1.046) and
EncoderOutputDenominator ID179 (P1.097), and converted using quadruple
(4x frequency).

 Loading...
Loading...









