390 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 12 Motion Control Applications
System Variables for Master Access Monitoring
The Kinetix 5100 drive also provides four system variables to monitor the
master axis:
• Cumulative Pulse of Master Axis - system variable 059(3Bh): this variable
is the feedback position of the Master. (E-CAMMasterAxisPosition, ID374
(P5.086))
• Incremental Pulse of Master Axis - system variable 060(3Ch): the
incremental number of pulses of the E-CAM master axis in 1ms.
• Lead Pulse of Master Axis - this variable is described as a Master Offset
Position. That is, after the E-CAM has been enabled, this position is the
incremental position that occurs (from the point of enabling) before the
E-CAM is engaged (and following the Master).
• Position of Master Axis - system variable 062(3Eh): the position of the E-
CAM master axis.
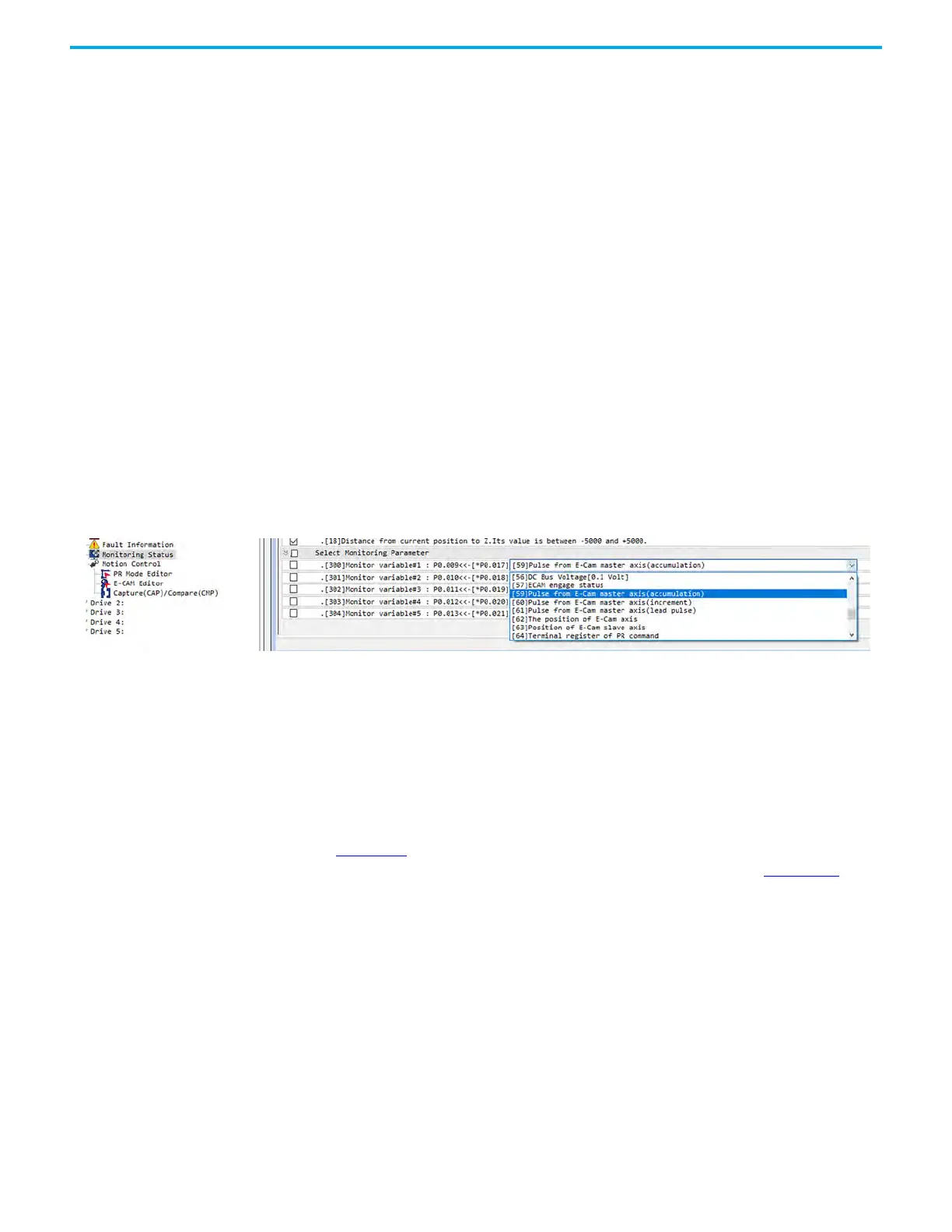
Go to Settings>Monitoring Status and select the variables to monitor by using
Monitoring Items and running the monitor. You can map these variables to
System Variable Monitoring values by using the Settings>Parameter
Editor>Status Monitor. This setting lets you use the Scope to monitor the
values real-time.
Figure 198 - Monitoring Parameters
When using the E-CAM, the Pulse Output function
(KNX5100C>Settings>Pulse Output) provides pulses so the next drive can
receive and follow those pulses.
The Kinetix 5100 drive only provides four pulse output pins OA, /OA, OB, /OB
respectively. The pulse can be input to the drive through the I/O connector or
AUX connector. The servo drive output signal source is determined by ID173
(P1.074.Y). If the AUX connector is used as the pulse input channel, as shown in
Figure 199
, then the value of ID173 (P1.074.Y) of each drive shall be set to 1. If the
I/O connector is used as the pulse input channel, as shown in Figure 200
, then
the value of ID173 (P1.074.Y) of each drive is set to 2.

 Loading...
Loading...









