296 Rockwell Automation Publication 2198-UM004D-EN-P - December 2022
Chapter 11 Motion Control in PR Mode
Figure 105 - Monitoring Variables’ Status When Executing a Command IN PR Mode
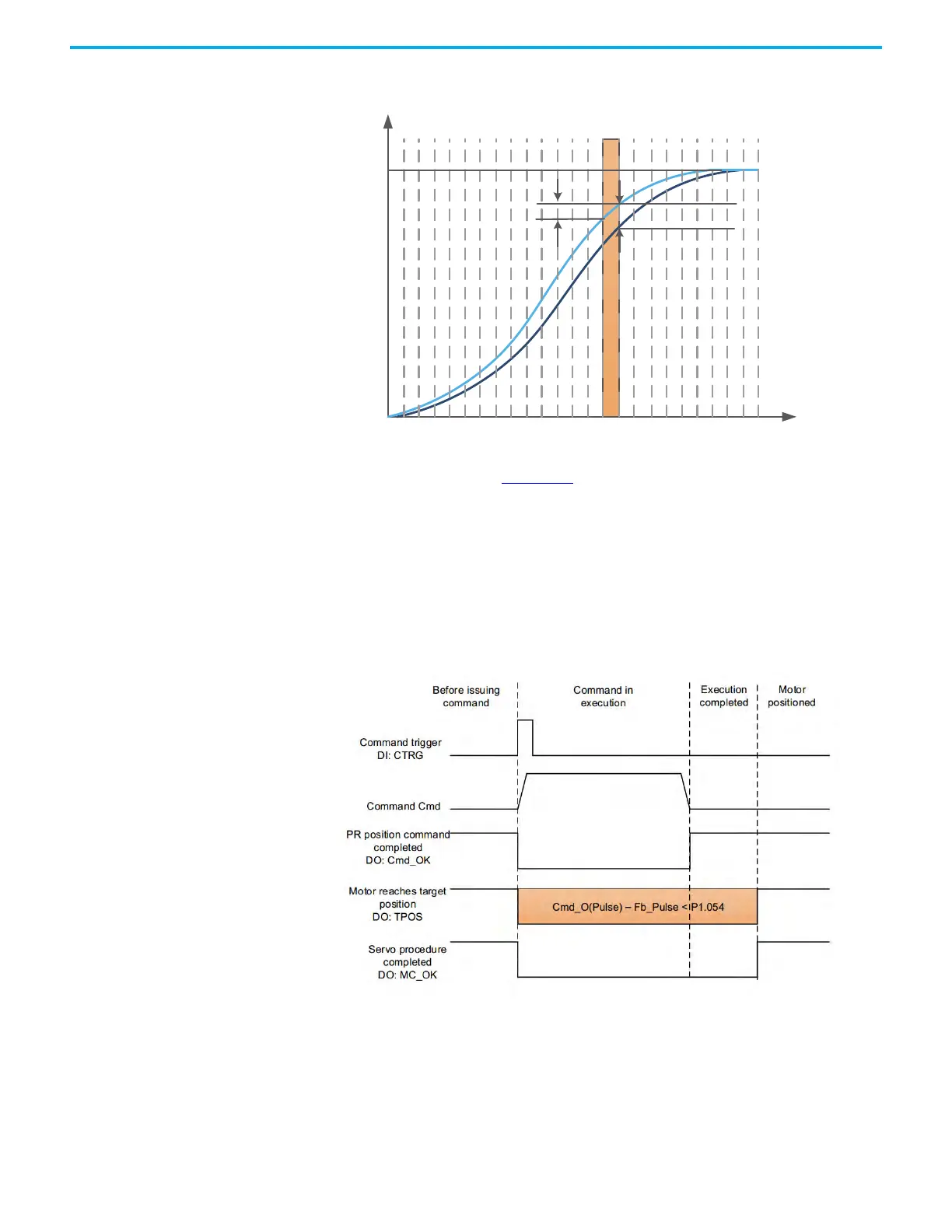
Use digital input (DI) and digital output (DO) signals to monitor PR
commands as shown in Figure 106
. When the motion command is triggered by
DI.CTRG [0x08], the servo drive operates based on the command from the
internal register. Once the execution is completed, DO.Cmd_OK [0x15] turns
on. And when the motor is within its target position window, which is set by
ID159 (P1.054) InPositionWindow, the DO.TPOS [0x05] is on. Once the PR
position command completes and the motor reaches the target position, both
DO signals are on and the servo drives outputs the MC_OK [0x17] signal to
signify that this PR command is completed.
Figure 106 - Operation of DI and DO Signals in PR Mode
Cmd_O
Err_PUU
Command
Fb_PUU
Position (PUU)
Time
Cmd_E

 Loading...
Loading...









