RM0453 Rev 1 965/1461
RM0453 Low-power timer (LPTIM)
981
28.4.15 Encoder mode
This mode allows handling signals from quadrature encoders used to detect angular
position of rotary elements. Encoder interface mode acts simply as an external clock with
direction selection. This means that the counter just counts continuously between 0 and the
auto-reload value programmed into the LPTIM_ARR register (0 up to ARR or ARR down to
0 depending on the direction). Therefore LPTIM_ARR must be configured before starting
the counter. From the two external input signals, Input1 and Input2, a clock signal is
generated to clock the LPTIM counter. The phase between those two signals determines
the counting direction.
The Encoder mode is only available when the LPTIM is clocked by an internal clock source.
The signals frequency on both Input1 and Input2 inputs must not exceed the LPTIM internal
clock frequency divided by 4. This is mandatory in order to guarantee a proper operation of
the LPTIM.
Direction change is signalized by the two Down and Up flags in the LPTIM_ISR register.
Also, an interrupt can be generated for both direction change events if enabled through the
DOWNIE bit.
To activate the Encoder mode the ENC bit has to be set to ‘1’. The LPTIM must first be
configured in Continuous mode.
When Encoder mode is active, the LPTIM counter is modified automatically following the
speed and the direction of the incremental encoder. Therefore, its content always
represents the encoder’s position. The count direction, signaled by the Up and Down flags,
correspond to the rotation direction of the encoder rotor.
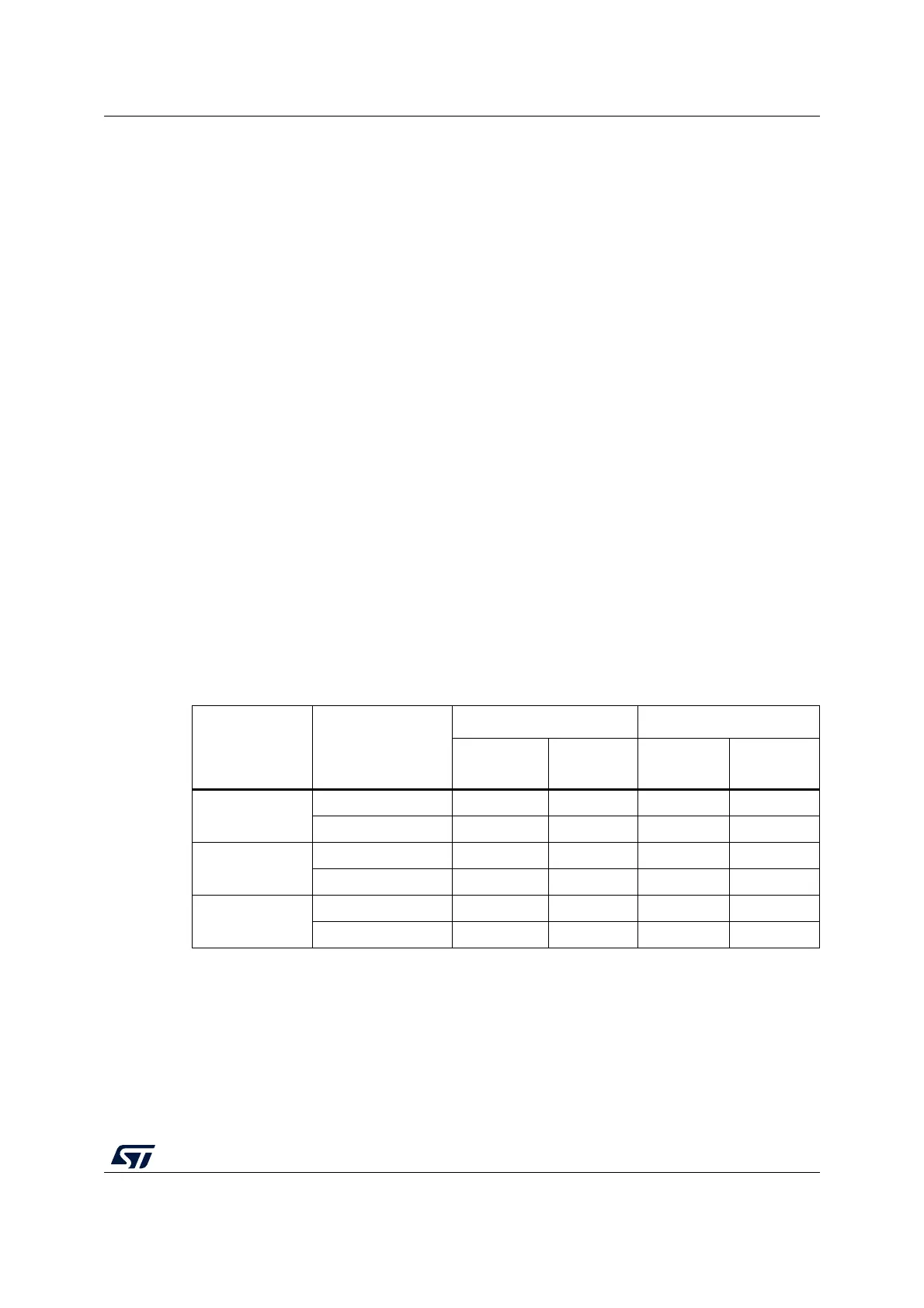
According to the edge sensitivity configured using the CKPOL[1:0] bits, different counting
scenarios are possible. The following table summarizes the possible combinations,
assuming that Input1 and Input2 do not switch at the same time.
The following figure shows a counting sequence for Encoder mode where both-edge
sensitivity is configured.
Caution: In this mode the LPTIM must be clocked by an internal clock source, so the CKSEL bit must
be maintained to its reset value which is equal to ‘0’. Also, the prescaler division ratio must
be equal to its reset value which is 1 (PRESC[2:0] bits must be ‘000’).
Table 200. Encoder counting scenarios
Active edge
Level on opposite
signal (Input1 for
Input2, Input2 for
Input1)
Input1 signal Input2 signal
Rising Falling Rising Falling
Rising Edge
High Down No count Up No count
Low Up No count Down No count
Falling Edge
High No count Up No count Down
Low No count Down No count Up
Both Edges
High Down Up Up Down
Low Up Down Down Up
 Loading...
Loading...