AKD BASIC User Guide | 3 AKDBASICLanguage
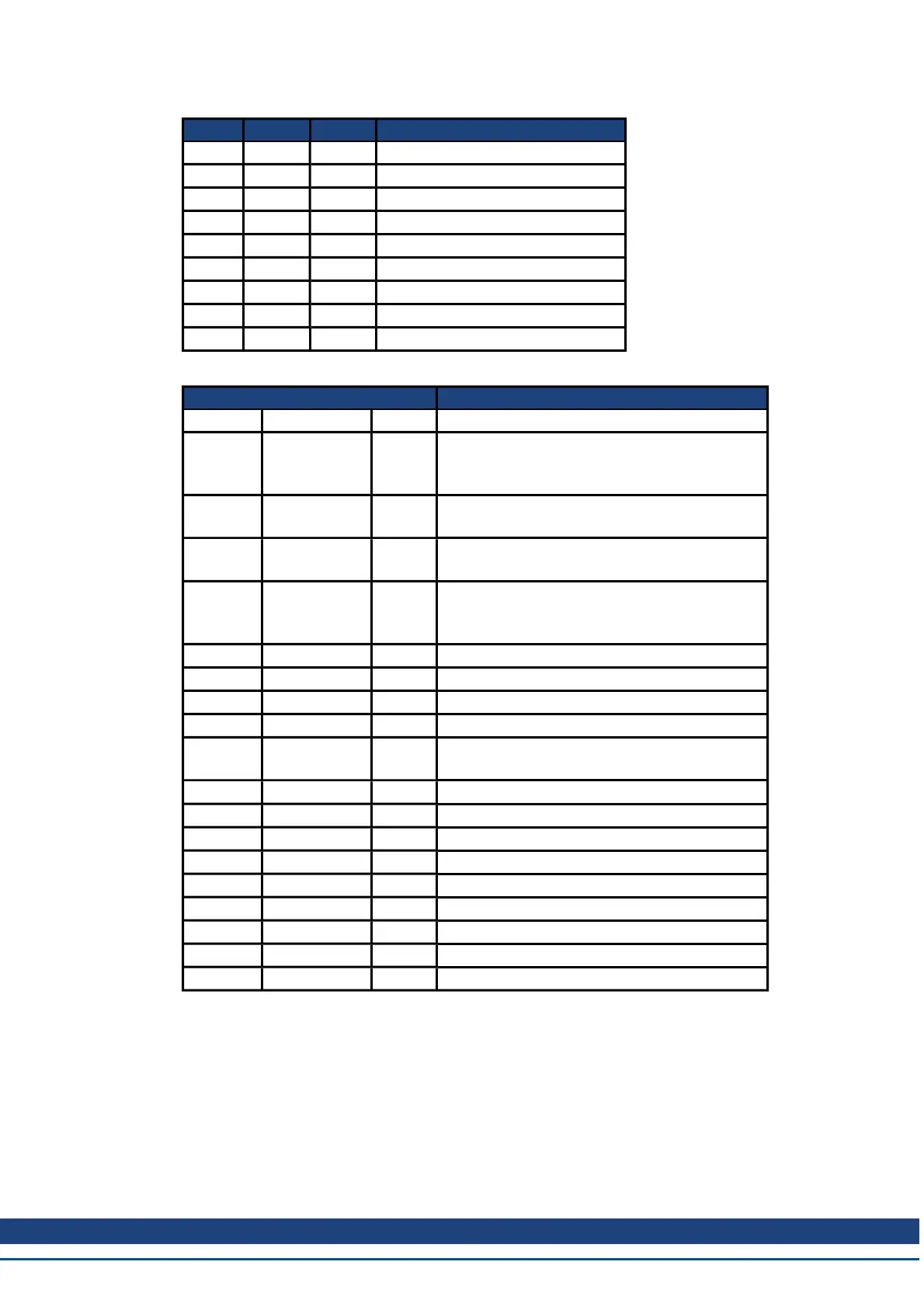
Name Args Return Semantics
EXP float float e ^ arg, arg 88.02969 (o/w overflow)
FIX numeric int truncate (round toward zero)
INT numeric int truncate (round towards -INFINITY)
LOG float float natural log
LOG10 float float log base 10
SGN numeric integer sign of argument: -1, 0, 1
SIN float float sine (radians)
SQR float float square root of arg
TAN float float tangent (radians)
String function Description
ASC string int ASCII code for 1st char
CHR$ int string
One-character string containing the character
with the ASCII code of arg. If arg 255, returns
CHR$(arg % 256).
HEX$ int string
Printable hexadecimal rep of arg (without lead-
ing &H).
INKEY$ string
One-character string, read from serial port.R-
eturns “” if no char available.
INSTR [pos],str1,str2 int
Index of str2 in str1, or 0 if not found. Optional
first arg specifies where to start search (defaults
to position 1).
LCASE$ str str Returns lower-case copy of arg.
LEFT$ str,n str Returns n leftmost chars of str.
LEN str int Returns length of str in bytes.
LTRIM$ str str Trim leading spaces.
MID$ str,n[,m] str
Returns substring starting at position n [for up to
to m bytes].
OCT$ n str Octal string representation of arg.
RIGHT$ str,n str Rightmost n chars of str.
RTRIM$ str str Trim trailing spaces.
SPACE$ n str Returns a string of n spaces.
STR$ n str Decimal string representation of str.
STRING$ n,str str Return n copies of first char of str.
TRIM$ str str Trim leading AND trailing spaces.
UCASE$ str str Returns upper-case copy of arg.
VAL str numeric Returns numeric value of str.
3.6.1 Parameters and Commands
The AKD BASIC language is augmented by a set of parameters, input\output parameters, and
pre-defined commands., The parameters set motor-specific control parameters, and the pre-
defined commands control the motor.
For example, MOVE.ACC, MOVE.DEC, and MOVE.RUNSPEED are used to set the accel-
eration rate, deceleration rate, and commanded motor speed for the next commanded move:
Kollmorgen™ | March 30, 2012 36