AKD BASIC User Guide | 6 AKD BASIC Parameters, Operators, Statements
6.25.11 PL.KP
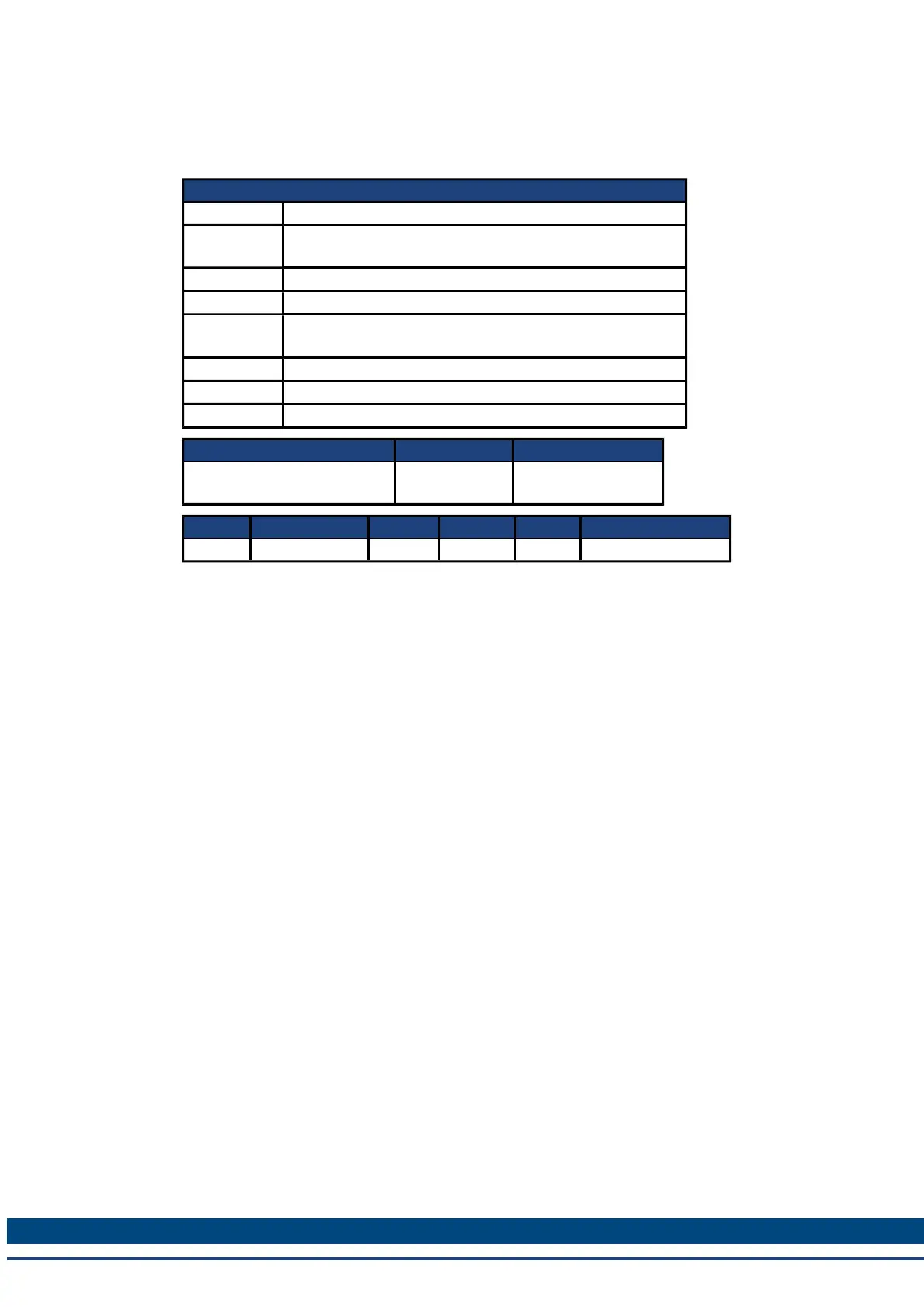
General Information
Type NV Parameter
Description
Sets the proportional gain of the position regulator PID
loop.
Units (rev/s)/rev
Range 0 to 2,147,483.008 (rev/s)/rev
Default
Value
100 rps/rev
Data Type Float
See Also PL.KI , PL.KD
Start Version M_01-00-00-000
Fieldbus Index/Subindex Object Start Version
EtherCAT COE and CAN-
open
3542h/0 M_01-00-00-000
Fieldbus Index/Subindex Is 64 bit? Attributes Signed? Object Start Version
Modbus 604 No 32 bit No M_01-03-00-000
Description
PL.KP sets the proportional gain of the position regulator PID loop.
Related Topics
PL.ERR | PL.ERRFTHRESH | PL.ERRMODE | PL.ERRWTHRESH
397 Kollmorgen™ | March 30, 2012