AKD BASIC User Guide | 6 AKD BASIC Parameters, Operators, Statements
6.12.3 EGEAR.ERROR
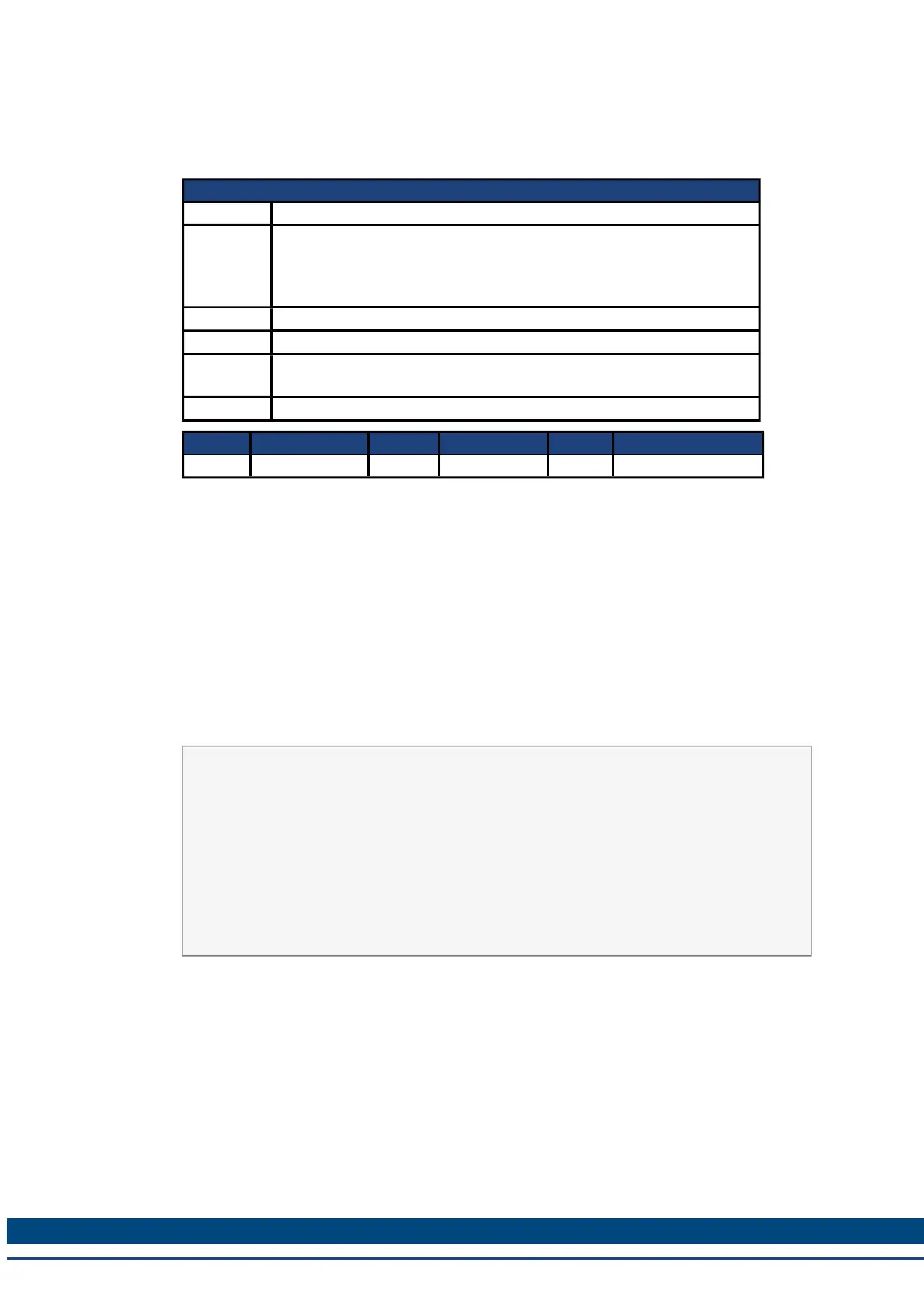
General Information
Type R/W
Description
Indicates the amount of position deviation that has accumulated on the
slave axis (in an electronic gearing application) as a result of the slave
axis limiting its acceleration or deceleration while achieving velocity syn-
chronization.
Units Position counts
Range TBD
Default
Value
TBD
Data Type Integer
Fieldbus Index/Subindex Is 64 bit? Attributes Signed? Object Start Version
Modbus 1064 Yes low 32 bit word No M_01-05-11-000
Description
EGEAR.ERROR is never automatically set to zero. It accumulates position deviation each
time acceleration limiting is activated. Typically, set EGEAR.ERROR to zero before doing
something that activates acceleration limiting.
The slave axis’ acceleration or deceleration is limited to EGEAR.ACCLIMIT or EGEAR.D-
ECLIMIT whenever:
1. Gearing is turned on or turned off.
2. Ratio is changed.
3. EGEAR.PULSESIN or EGEAR.PULSESOUT is changed.
Example
EGEAR.ACCLIMIT = 10000
EGEAR.PULSESIN = 1
EGEAR.PULSESOUT = 1
EGEAR.ERROR = 0
EGEAR.TYPE = 0
EGEAR.ON = 1
While EGEAR.LOCK = 0 : wend
MOVE.RELATIVEDIST = EGEAR.ERROR
MOVE.GOREL 'catch up the position
lost while acceleration was being limited
Related Topics
EGEAR.LOCK | EGEAR.ACCLIMIT |EGEAR.DECLIMIT
255 Kollmorgen™ | March 30, 2012